ROS and ROS 2#
ROS (Robot Operating System) is a set of software libraries and tools for building robotics applications. Isaac Sim is connected to ROS through the ROS bridge and ROS2 bridge extensions.
Warning
ROS 1 support is deprecated and will be removed in a future release
ROS 2 Foxy is no longer tested or supported. This may result in potential issues when ROS 2 Foxy is used in conjunction with Isaac Sim 4.2 or later
The following tutorials detail the process of extracting and manipulating synthetic data generated by Omniverse Isaac Sim and publishing them to your ROS applications.
Important
The workflow for enabling and running the ROS/ROS2 Bridge on Isaac Sim has changed in our latest release of Isaac Sim! Please ensure to look at the ROS and ROS 2 Installation instructions before proceeding to the tutorials. We recommend ROS2 Humble with Omniverse Isaac Sim.
Isaac Sim ROS 2 Reference Architecture#
This section presents an overview of the ROS 2 workflow with Isaac Sim and the associated building blocks. It is designed to provide robotics developers working with ROS 2 with the necessary information to integrate Isaac Sim into their existing workflows for simulating and validating their robot software stacks.
This workflow which includes importing assets, setting up and interacting with the scene can be performed in the GUI or in headless mode with Python scripting. Isaac Sim also comes with an internal set of minimal ROS 2 libraries which can be used to enable the ROS 2 Bridge when there is no system level ROS 2 installation, refer Running ROS without a System Level Install . This can be particularly useful in container based workflows where simulation and the robot software are run in 2 separate containers. The Isaac Sim container can interact with ROS 2 software running in another container after the bridge is enabled.
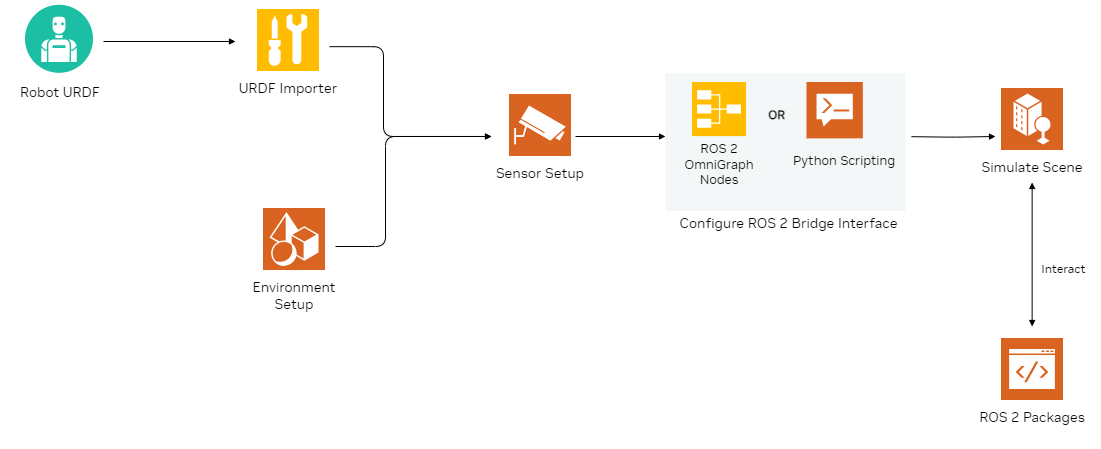
The URDF importer can be used to import the robot. After adding sensors, developers can use Python scripting or ROS 2 OmniGraph Nodes provided with the ROS 2 Bridge Extension to enable their simulation scene and robot to interact with ROS 2.
Robot URDF#
The Unified Robotics Description Format or URDF is an XML file format which is commonly used in ROS 2 and the robotics community to describe the elements of a robot. All the links, joints, visual and collision meshes and materials of the robot are represented with their hierarchical structure in the XML file. Developers can use packages and tools to verify and visualize URDF files. Many robotics manufacturers provide URDF models for their robots.
URDF contains various elements/tags like robot, sensors, joints and transmission to define the robot and its components. Optionally, custom Isaac Sim tags for sensors can also be added to the URDF file. This currently supports pre-configured lidars or user-defined configurations.
Popular CAD modeling softwares like SolidWorks, Fusion360 and OnShape support methods to export robot models to URDF.
URDF Importer#
Isaac Sim comes with an extension to Import URDF which allows users to bring in their own robot URDF files. Extensions enable developers to add functionality and integrate other tools for Isaac Sim. The URDF importer extension is open-source and converts the robot URDF to USD so that it can be used with Isaac Sim. The importer can directly ingest the URDF file or subscribe to a ROS 2 topic on which the robot description is being published. Various parameters like importing inertia tensors, fixing the base link, setting joint strength and damping, collision and physics properties can be set while importing the robot. Tuning of the physics parameters of the robot is also supported through a variety of Schemas and APIs.
Developers can also access a variety of pre-packaged Robot Assets which can be directly added to any scene.
Environment Setup#
The CAD converter can be used to import assets from various CAD modeling tools. Isaac Sim also comes with more than a thousand of ‘SimReady’ assets. SimReady or simulation-ready assets are physically accurate 3D objects that encompass accurate physical properties, behavior and connected data streams to represent the real world in simulated digital worlds. These can be used as building blocks to construct the environment for the robots. The warehouse asset collection comprises over 800 3D assets of commonly available tools, equipment and items in a warehouse including forklifts, pallets, racks and shelves.

Isaac Sim also contains a few Environment Assets like a simple room, warehouse, hospital and office. Developers can leverage various tools like Warehouse Creator Extension and Conveyor Belt Utility to build an environment for their use case. People assets can also be added to the scene performing tasks like walking, sitting, standing and looking around through the Omni.Anim.People extension. 3D scenes built in other digital content creation tools can also be imported via OpenUSD.
Add Sensors#
Once the robot is imported and the environment is set up, the next step is adding the relevant sensors. Developers can leverage a variety of sensors including: RGB and RGBD cameras, 2D and 3D RTX Lidars, and physics-based sensors (e.g. contact sensor, IMUs, radar, ultrasonic sensors, …). Commonly used sensors including cameras like Intel Realsense, Hawk Stereo camera by Leopard Imaging, ZED X by Stereolabs and Lidars from Hesai, Velodyne, SLAMTEC, SICK and Ouster are available and many more can be found at Sensor Assets. These can be added directly to the robot and the environment.
Configure ROS 2 Bridge Interface#
Isaac Sim connects to ROS 2 through the ROS 2 Bridge extension. There are 2 main ways in which developers can interface with ROS 2 using this extension:
ROS 2 OmniGraph Nodes
Python Scripting
ROS 2 OmniGraph Nodes#
This ROS 2 Bridge extension consists of various OmniGraph (OG) Nodes designed for ROS 2 developers. OG nodes are not the same as ROS 2 nodes, they have separate frameworks. OG nodes provide an encapsulated piece of functionality that can be used in a connected graph structure to perform complex tasks in a simulation scene. As a simple example, an OG node can be created which adds a cube to the current stage and changes its position based on some constraints. A large collection of OG nodes are provided with extensions in Isaac Sim.
The ROS 2 Bridge gives developers access to a variety of OG nodes useful for robotics tasks which can interface with ROS 2. These OG nodes can be used to publish data from a simulated camera or lidar, publish the transform tree of a robot and subscribe to velocity messages, refer to the ROS 2 Tutorials (Linux & Windows) page. They can be connected to build an Action Graph which enables complex tasks like navigation and manipulation with popular ROS 2 packages. Many commonly used Action Graphs can now be directly added to the scene and can be found at Commonly Used Omnigraph Shortcuts

The image above denotes a simple action graph created using OG nodes. This enables publishing simulation time on a ROS 2 topic with the appropriate message type. Some of the key OG nodes from the figure above perform the following tasks:
On Playback TIck: This node executes an output execution pulse during playback
Isaac Read Simulation Time: Provides the simulation time
ROS 2 Publish Clock: This OG node is a part of the ROS 2 Bridge Extension. It is active once it is connected to the output of the ‘On Playback Tick’. It receives the simulation time from the ‘Isaac Read Simulation Time’ node and publishes this on a ROS 2 topic which can be modified in the node. This is important because simulation time is used for synchronizing the ROS 2 nodes which is not the same as real world time.
The ROS 2 OG nodes also have various parameters like topic name, namespace, context and QoS which can be modified.
Developers can write their own OG nodes for task specific requirements as well in C++ or Python. For example if you want to publish contact sensor state on a custom message topic.
Python Scripting#
Isaac Sim comes with a built-in Python 3 environment. This can be accessed from the Script Editor or through the standalone Python Environment. Enabling the ROS 2 Bridge gives access to rclpy, the ROS 2 client library for Python. This makes it possible to write your custom ROS 2 code containing nodes, services and actions which can directly access and modify data from the scene and the simulated robot when scripting in Python. ROS 2 custom message support is enabled by sourcing your workspace before running Isaac Sim, refer to the ROS 2 Python Custom Messages tutorial.
ROS 2 OG nodes can also be created, modified and connected to form an Action Graph via their Python APIs.
Simulate Scene#
After the environment and robots have been imported and the action graphs for ROS 2 have been set up we can start simulating the scene. Once you hit play in simulation, all ROS 2 OG nodes will enter the active state and will publish and subscribe to data depending on how the graph was set up. An important note here is that all ROS 2 OmniGraph nodes depend on the simulation being in the running or active state which happens after hitting play.
ROS 2 Packages#
After starting the simulation, developers can use their ROS 2 packages to control the simulated robot and scene. The ROS 2 OG nodes or your Python code will perform the role of interfacing with your ROS 2 software and controlling the simulated robot in the scene. For example, sensor and robot state data can be sent via the ROS 2 bridge which the robotics software stack can then consume. These algorithms might output actions on the basis of the input received. Then, the simulated robot performs these actions.
Next Steps#
Refer to the ROS Tutorials for getting started.