April Tags
Learning Objectives
In this example, we show how to detect April Tags in a scene.
Getting Started
Prerequisites
ROS bridge is enabled.
Completed Cameras and Transform Trees and Odometry.
Install the apriltag-ros package for April Tag detection.
noetic_wswas sourced.
Detect April Tags
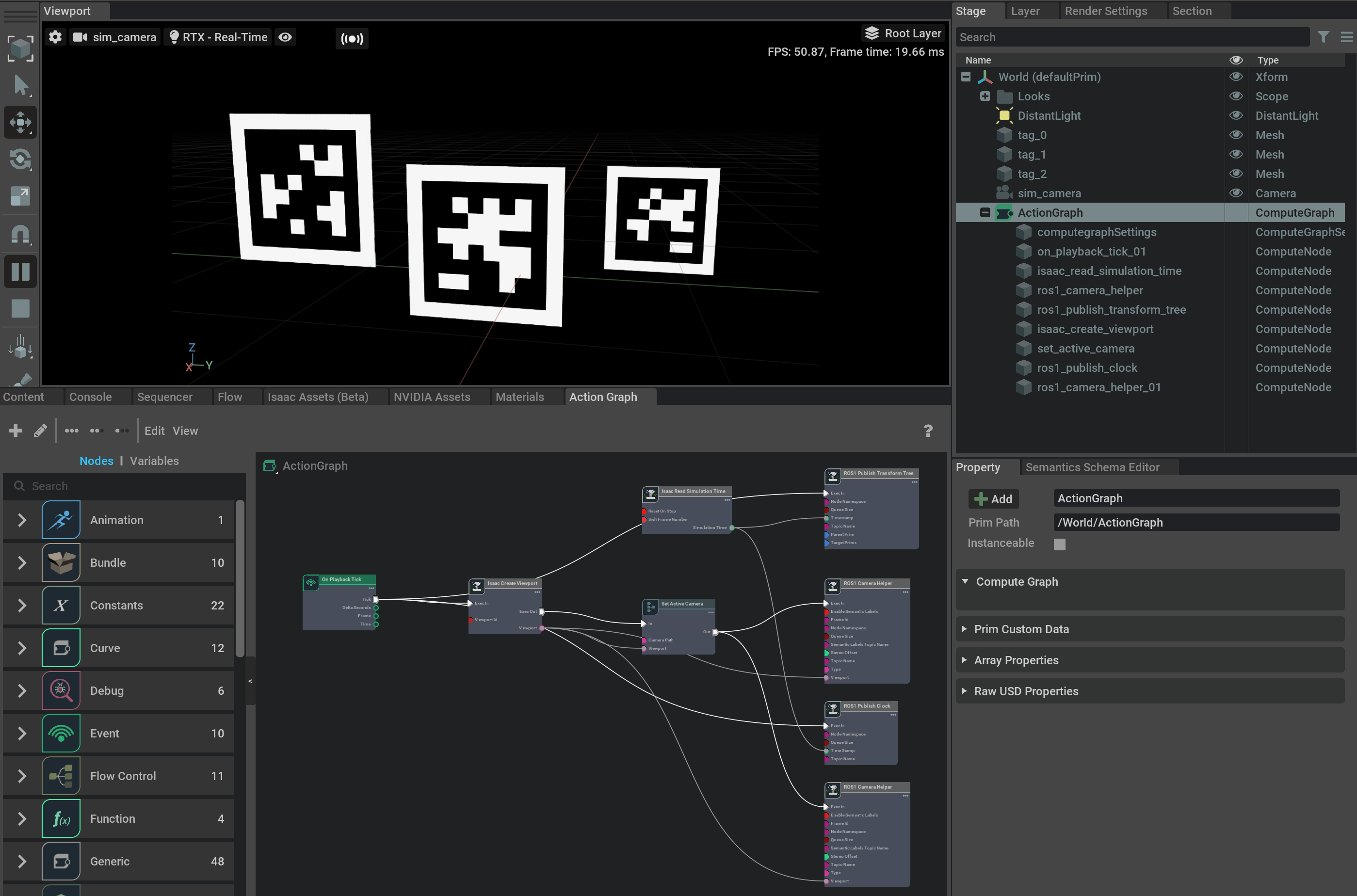
Open the April Tag example by going to Isaac Examples -> ROS -> April Tag. Three April Tags will show up in the viewport.
Open up the Stage Tree, and then open the ActionGraph by right-clicking on the prim and selecting Open Graph. The ROS Clock publisher, TF publisher and Camera Helper nodes (for initiating the camera_info and rgb image publishers) should already be setup.
Press Play to start publishing data to ROS
In a new terminal with your ROS environment sourced, run
roslaunch isaac_tutorials apriltag_continuous_detection.launchto run the april_tag detection node.In a new terminal with your ROS environment sourced, run
rviz -d <noetic_ws>/src/isaac_tutorials/rviz/apriltag_config.rvizto start rviz and show the detections from the camera imageTo see the raw data for the detected tags run
rostopic echo tag_detections

Summary
This tutorial shows the basics of detecting April Tags in Omniverse Isaac Sim.
Next Steps
Continue on to the next tutorial in our ROS Tutorials series.
Further Learning
More on April Tags with ROS
If you wish to attach your own April Tag to objects, instructions are in April Tags