Overview and Getting Started#
Isaac Sim Replicator is a collection of extensions (mainly omni.replicator), Python APIs, workflows, and tools, such as Replicator YAML,that enable a variety of synthetic data generation tasks.
The Semantics Schema Editor#
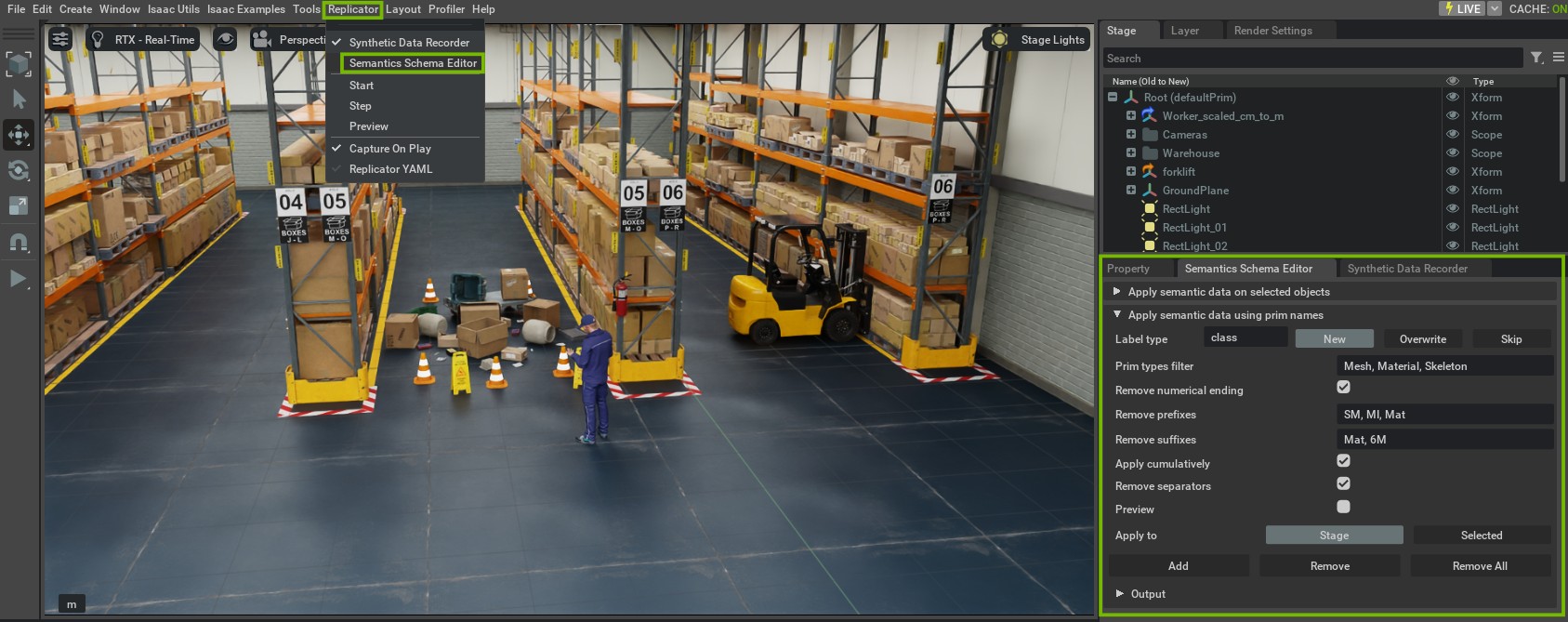
To use the annotation capabilities of Replicator (for example, semantic segmentation or 3d bounding boxes) the entities in the scene need to be semantically annotated. The Semantics Schema Editor extension is a GUI-based tool that can view, add, edit, or remove, class types or other key-value semantic information to prims in a stage.
To access the editor, navigate to Replicator > Semantics Schema Editor at the top of Kit. The editor appears as a tab in the Properties pane by default.
For more information about the Semantics Schema Editor, please further refer to its documentation. For programmatically iterating and labeling a whole stage using various rules see the following example snippet as a starting point.
The Synthetic Data Visualizer#
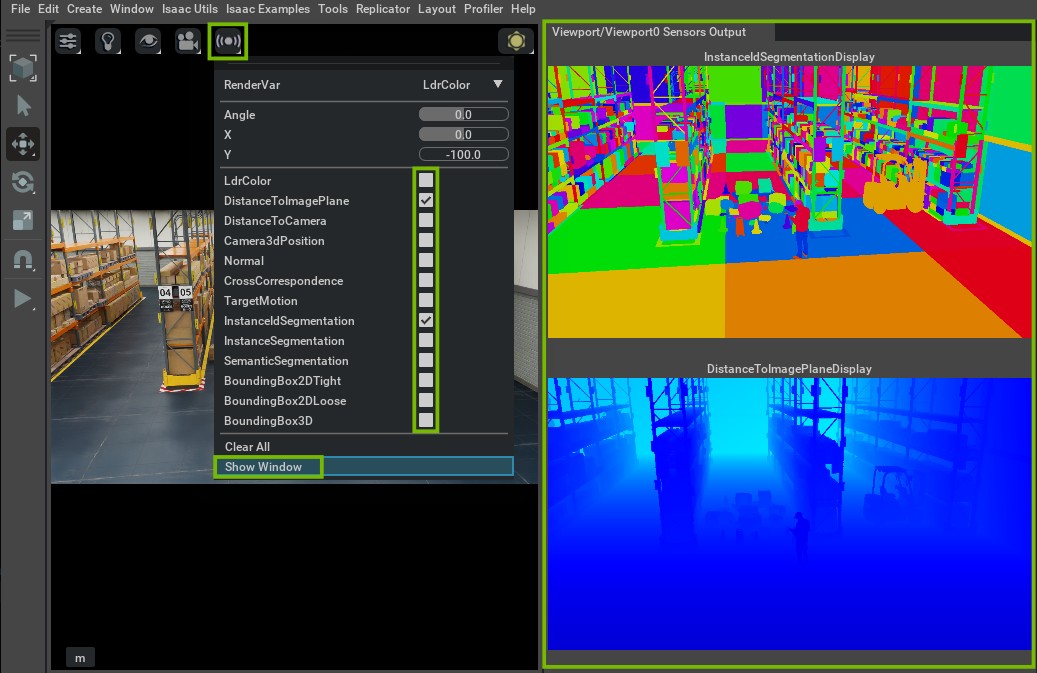
Visualizing the output of synthetic sensors is done using the  visualizer tool in the Viewport window and selecting the desired output formats.
visualizer tool in the Viewport window and selecting the desired output formats.
Note
If the camera name is too long, the icon in the Viewport window might get obscured.
For a more thorough introduction to the visualizer tool, see the Visualizing Synthetic Data tutorial in the omni.replicator documentation.
Note
Cross Correspondence visualization requires a specific two-camera setup explained in the Cross Correspondence section of the annotator details page.
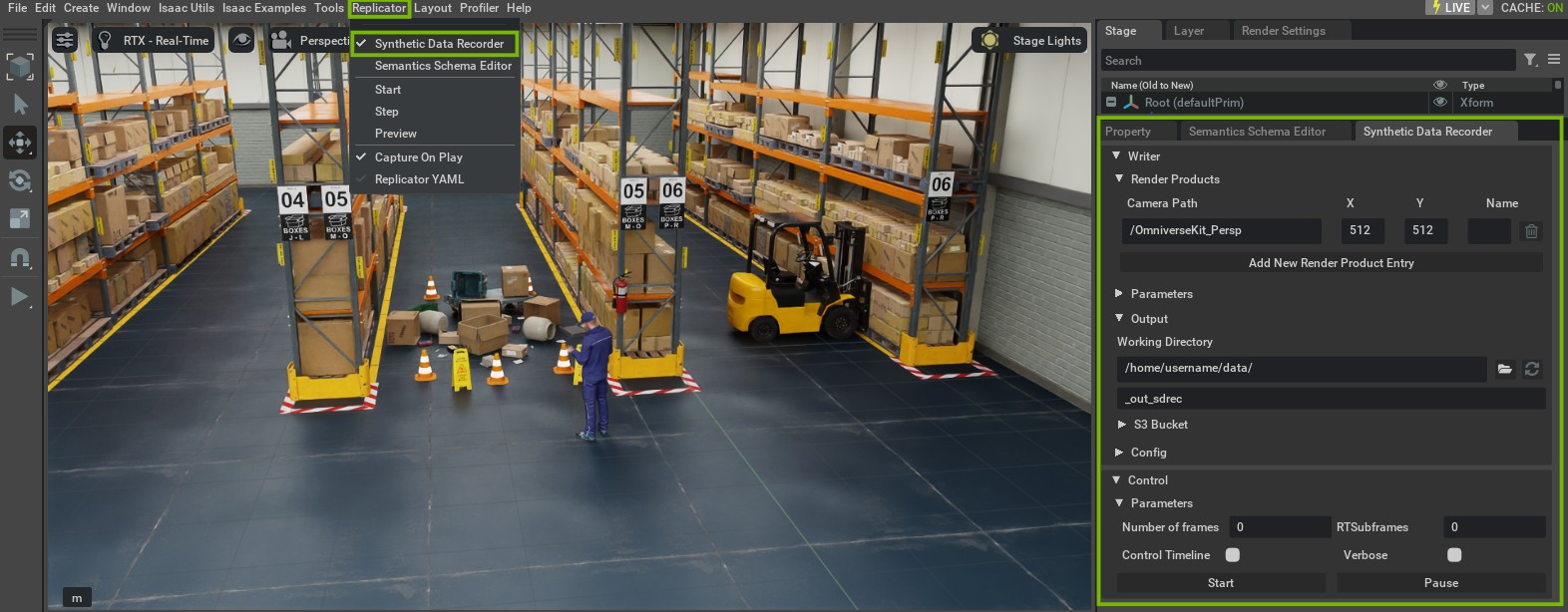
The Synthetic Data Recorder#
The Synthetic Data Recorder extension can be used as a GUI-based synthetic data acquisition tool built on top of Replicator’s API.
Additional Information#
The On-Demand sessions: Synthetic Data Generation using the Omniverse Replicator SDK and How to Generate Synthetic Data for Training AI Models with Isaac Replicator, together with the Isaac Sim/Robotics Weekly Livestream: Synthetic Data Generation are additional recommended resources for a deeper understanding of Replicator.
Note
Access to some On-Demand content is available only after completing the free registration to the NVIDIA Developer Network.