Cameras#
OpenUSD’s camera model, UsdGeomCamera, models a basic pinhole camera. Additionally, RTX provides applied API schema to allow modeling fisheye and other distortion effects.
Note
Some camera properties may be overridden by a renderer.
Units#
Note that OpenUSD chooses to express several camera properties in units of “tenths of a scene unit” in order for a camera’s projection to continue to work if the entire scene is scaled. Tenths of a scene unit was chosen because of USD’s default scene unit, which is centimeters. So a 25mm focal length would be represented as 25 tenths of a scene unit. This often causes some confusion when a stage is, for example, in meters, in which case a 25mm focal length would be 0.25.
In the tables below, quantities measured in tenths of a scene unit are noted as “Tenths”. Care should be taken when setting those to match properties of a real device.
Lens#
Lens |
Description |
Units |
|---|---|---|
Focal Length |
Longer focal lengths produce a narrower FOV; shorter focal lengths produce a wider FOV.
|
Tenths
|
Focus Distance |
The distance at which perfect sharpness is achieved.
|
Scene Units
|
fStop |
Controls depth of field blur. Lower values narrow focus range; higher values widen it.
|
N/A
|
Projection |
Sets camera to perspective or orthographic mode.
|
N/A
|
Stereo Role |
Specifies stereoscopic role (left/right eye, mono (default), or non-stereo).
|
N/A
|
Aperture#
Aperture |
Description |
Units |
|---|---|---|
Aperture (Horizontal) |
Emulates sensor/film width on a camera.
|
Tenths
|
Aperture Offset (Horizontal) |
Offsets Resolution/Film gate horizontally.
|
Tenths
|
Aperture (Vertical) |
Emulates sensor/film height on a camera.
|
Tenths
|
Aperture Offset (Vertical) |
Offsets Resolution/Film gate vertically.
|
Tenths
|
Clipping#
Clipping |
Description |
Units |
|---|---|---|
Clipping Planes |
N/A
|
|
Clipping Range |
Clips the view outside of both near and far range values.
|
Scene Units
|
Rolling Shutter#

A propellor rendered with rolling shutter, showing the typical distortion of the propellor blades#
By default, RTX models a global shutter sensor, that is, a sensor where all photosites are exposed to light at the same time, and for the same duration. A rolling shutter sensor, by contrast, is a sensor where photosites are exposed to light progressively, often row by row. These sensors are typified by images where straight lines in motion become curved due to the offset in exposure time throughout the image, as shown in the example above.
Note
In order to use rolling shutter, motion raytracing must be enabled.
This can be done by specifying either one of the following settings:
--/renderer/raytracingMotion/enabled=trueto force-enable motion raytracing in all scenes.--/renderer/raytracingMotion/allowRuntimeToggle=trueto enable motion raytracing only when required (such as when a camera is using the rolling shutter feature).
Additionally, on Windows, --vulkan must be specified in order to use motion raytracing.
Specifying Per-Pixel Exposure Times#
In order to simulate rolling shutter, the renderer must know when during the frame each pixel should begin exposing to light. This is specified by a shutter time texture, which is expected to be a single-channel, floating-point OpenEXR image, where each pixel defines the exposure offset of the corresponding pixel in the rendered image.
If the dimensions of the shutter time texture and the render do not match, then the shutter time texture will be resized to match the render dimensions using linear interpolation.
A common use case is to have all pixels within a row expose at the same instant, while subsequent rows from top to bottom are offset from the previous row with a constant offset. In this case, the shutter time texture can be a single column with values ranging from 0.0 to 1.0, and all pixels within each rendered row will use the same value:

A single-column shutter timing texture with values ranging from 0.0 to 1.0 vertically#
Currently, the time value must be in the range [0, 1], where 0 specifies the start of the previous frame and 1 specifies the start of the current frame.
Note
Currently, each pixel is assumed to expose instantaneously. That is, the shutter time value just specifies the instant at which each pixel “sees” the scene and there will be no visible motion blur, just distortion.
Future versions will allow specifying both offset and exposure time to capture blur correctly, as well as allowing more flexibility in the timing (such as exposing over multiple “frames” of motion changes).
The example Python script below can be used to generate these textures with customizable line orders and sizes.
Shutter Timing Texture Generation Script
1# Copyright (c) 2024, NVIDIA CORPORATION. All rights reserved.
2#
3# NVIDIA CORPORATION and its licensors retain all intellectual property
4# and proprietary rights in and to this software, related documentation
5# and any modifications thereto. Any use, reproduction, disclosure or
6# distribution of this software and related documentation without an express
7# license agreement from NVIDIA CORPORATION is strictly prohibited.
8
9
10# This script can generate textures compatible with the "GeneralizedProjectionTexture" lens projection.
11# It generates a forward/inverse texture pair that drives the projection.
12# This script can generate these textures by mimicing the existing omni fisheye projections
13# and baking them as textures.
14
15# This python script will require pipinstalls for the following python libraries:
16# /// script
17# dependencies = [
18# "OpenEXR",
19# "numpy",
20# ]
21# ///
22import OpenEXR
23import Imath
24import math
25import numpy as np
26
27# Compression for the .exr output file
28# Should be one of:
29# NO_COMPRESSION | RLE_COMPRESSION | ZIPS_COMPRESSION | ZIP_COMPRESSION | PIZ_COMPRESSION
30#g_compression = Imath.Compression.NO_COMPRESSION
31g_compression = Imath.Compression.ZIP_COMPRESSION
32
33def save_img(img_path: str, img_data):
34 """ Saving a numpy array to .exr file """
35
36 if img_data.ndim != 3:
37 raise "The input image must be a 2-Dimensional image"
38
39 height = img_data.shape[0]
40 width = img_data.shape[1]
41 channel_count = img_data.shape[2]
42
43 channel_names = ['R', 'G', 'B', 'A']
44
45 channel_map = {}
46 channel_data_types = {}
47
48 for i in range(channel_count):
49 channel_map[channel_names[i]] = img_data[:, :, i].tobytes()
50 channel_data_types[channel_names[i]] = Imath.Channel(Imath.PixelType(Imath.PixelType.FLOAT))
51
52 header = OpenEXR.Header(width, height)
53 header['Compression'] = g_compression
54 header['channels'] = channel_data_types
55 exrfile = OpenEXR.OutputFile(img_path, header)
56 exrfile.writePixels(channel_map)
57 exrfile.close()
58
59def compute_shutter_time(width, height, pixel_tuples, time_tuples, is_scan_vertical):
60
61 assert len(pixel_tuples) == len(time_tuples), "pixel range tuples need to match time range tuples"
62
63 pixel_count = height if is_scan_vertical else width
64 timing_per_pixel = np.zeros((pixel_count, 1), dtype=np.float32)
65
66 for pixel_range, time_range in zip(pixel_tuples, time_tuples):
67 assert len(pixel_range) == len(time_range), "pixel range size need to match time range size"
68 pixel_range_start = max(math.ceil(pixel_range[0] * pixel_count), 0)
69 pixel_range_end = min(math.floor(pixel_range[1] * pixel_count), pixel_count-1)
70 num_pixels = pixel_range_end - pixel_range_start + 1
71 timing_per_pixel[pixel_range_start:pixel_range_end + 1, 0] = np.linspace(time_range[0], time_range[1], num = num_pixels)
72 # print(timing_per_pixel)
73
74 return timing_per_pixel
75
76def generate_shutter_timing_texture():
77 width = 1920
78 height = 1080
79
80 is_scan_vertical = True
81 is_scan_downwards_rightwards = True;
82
83 # Only applied for is_scan_vertical = true
84 # A parameter set to determine different offsets of the exposure start (shutter open delay) within the line.
85 # Parameter row_x shall be the normalized list of the tuple (pixel region x start, pixel region x stop)
86 #row_x=[(0,0.5),(0.5,1)]
87 row_x=[(0,1.0)]
88 # Parameter row_t shall be a list of offset delay tuples which are defined by (delay start, delay end)
89 # If the delay start and delay end differs, all values in between shall be linear interpolated between delay start and delay stop
90 row_t=[(0.0,1.0)]
91
92 # Only applied for is_scan_vertical = false
93 # A parameter set to describe the temporal offset of each line (readout delay)
94 # The first parameter column_y shall be the normalized list of the tuple (pixel region y start, pixel region y stop)
95 column_y=[(0,1.0)]
96 # The second parameter column_t shall be a list of offset delay tuples of a line which are defined by (delay start, delay end)
97 # If the delay start and delay end differs, all values in between shall be linear interpolated between delay start and delay stop
98 column_t=[(0.000,1.000)]
99
100
101
102 timing_per_pixel = compute_shutter_time(width, height, row_x, row_t, is_scan_vertical)
103
104 if not is_scan_vertical:
105 timing_per_pixel = np.transpose(timing_per_pixel)
106
107 img_data = np.zeros((height if is_scan_vertical else 1, 1 if is_scan_vertical else width, 1), dtype=np.float32)
108 img_data[:, :, 0] = timing_per_pixel[:, :]
109
110 scan_direction = "vertical" if is_scan_vertical else "horizontal"
111 save_img(f"shutter_time_{scan_direction}_{width}x{height}.exr", img_data)
112
113def main():
114 generate_shutter_timing_texture()
115
116
117if __name__ == "__main__":
118 main()
Assigning The Shutter Timing Texture#
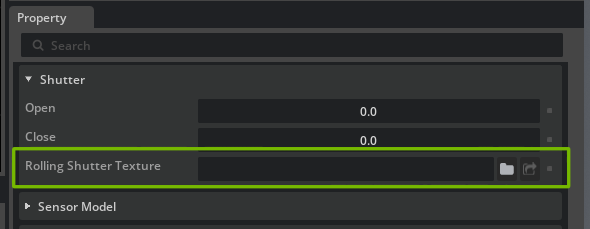
To assign the shutter timing texture to a camera, set the camera’s asset shutterTimeTexturePath attribute. In Kit, this appears in the Shutter section in the Property Window.
Once the shutter time texture is assigned, the camera will render with rolling shutter when the scene is in motion, for example by playing the timeline in Kit, or rendering a series of changes with movement in Sensor RTX.
Exposure#
The brightness of an image captured by a camera is a combination of the camera’s exposure time and other properties of the camera system. In a real camera, attributes such as the exposure time or aperture size will affect other properties of the image such as motion blur or depth of field. In OpenUSD these effects are separated to allow maximum control over the image generation and it is the user’s responsibility to ensure that the aperture used for depth of field matches the aperture used for exposure if that is desired.
Note
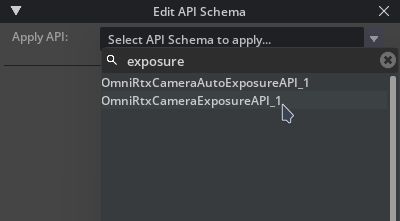
Camera exposure is a feature of OpenUSD 25.05. Until Kit upgrades to 25.05 or later, you can use these attributes by applying an instance of OmniRtxCameraExposureAPI_1 to your camera. The attributes in this schema have the same names as in OpenUSD 25.05 so will continue to work when USD is upgraded (at which point OmniRtxCameraExposureAPI_1 will become redundant).
How to Add Schemata to Cameras
Schemata can be applied using the OpenUSD Python API :
camera_prim = stage.DefinePrim("/World/Camera", "Camera")
camera_prim.ApplyAPI("OmniRtxCameraExposureAPI_1")
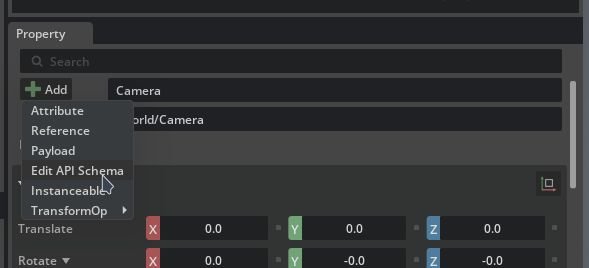
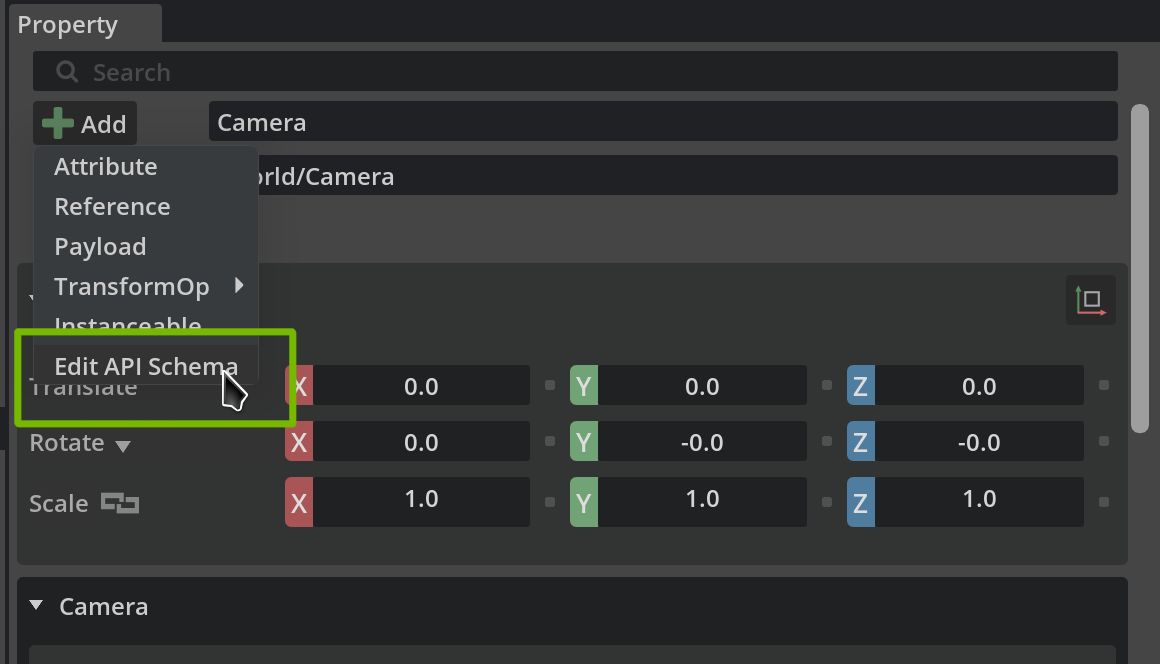
or by using the omni.kit.widget.schema_api extension. The Schema API widget adds functionality for adding a schema to a prim from the Property Window:
Attribute Name |
Type |
Default |
Description |
|---|---|---|---|
|
float |
0.0 |
Exposure compensation, as a log base-2 value. The default of 0.0 has no effect. A value of 1.0 will double the image-plane intensities in a rendered image; a value of -1.0 will halve them. |
|
float |
5.0 |
f-stop of the aperture when calculating exposure. Smaller numbers create a brighter image, larger numbers darker. Note that the |
|
float |
100.0 |
The speed rating of the sensor or film when calculating exposure. Higher numbers give a brighter image, lower numbers darker. |
|
float |
1.0 |
Scalar multiplier representing overall responsivity of the sensor system to light when calculating exposure. Intended to be used as a per camera/lens system measured scaling value. |
|
float |
1.0 |
Time in seconds that the sensor is exposed to light when calculating exposure. Longer exposure times create a brighter image, shorter times darker. Note that |
Note that the exposure attributes on a camera supersede those in the Render Settings -> Post-Processing -> Tone Mapping settings and allow you to set different exposures on different cameras. Once Kit upgrades to OpenUSD 25.05 or later, only the camera controls will work.
Lens Calibration#
The RTX Renderer supports a variety of lens distortion models to allow matching real-world measured cameras. Commonly used schema models include OpenCV pinhole and fisheye, a generalized LUT model, and omni-directional stereo.

A scene rendered with a fisheye projection schema#
OmniLensDistortion Schemata#
The primary method of applying lens distortion to a camera is to use one of the OmniLensDistortion schemata, which are provided by the omni.usd.schema.omni_lens_distortion extension. For the generated API reference and complete schema attribute list, see the OmniLensDistortion schema documentation.
Note
When an OmniLensDistortion schema is applied, projection and distortion are driven entirely by the schema’s own parameters (fx, fy, cx, cy, imageSize, and the applicable k*, p*, and s* coefficients). The camera’s focalLength and aperture attributes are ignored for projection and distortion.
Depth of field is the exception: it continues to use the camera properties (focalLength, focusDistance, fStop) rather than the schema parameters.
Note
Several older cameraProjectionType values and their matching lens distortion models are supported for compatibility with existing calibrated cameras, but are deprecated. For new cameras, prefer OmniLensDistortionOpenCvPinholeAPI, OmniLensDistortionOpenCvFisheyeAPI, OmniLensDistortionLutAPI, or OmniLensDistortionOmniDirectionalStereoAPI. Use OmniLensDistortionLutAPI when you need to preserve a custom or wide projection that does not have a dedicated schema.
Legacy cameraProjectionType |
Use |
|---|---|
|
Bare |
|
|
|
|
|
|
|
|
|
|
|
The legacy projection remains supported. There is no dedicated OmniLensDistortion spherical schema; use |
How to Add Schemata to Cameras
Schemata can be applied using the OpenUSD Python API :
camera_prim = stage.GetPrimAtPath("/World/Camera")
camera_prim.ApplyAPI("OmniLensDistortionOpenCvPinholeAPI")
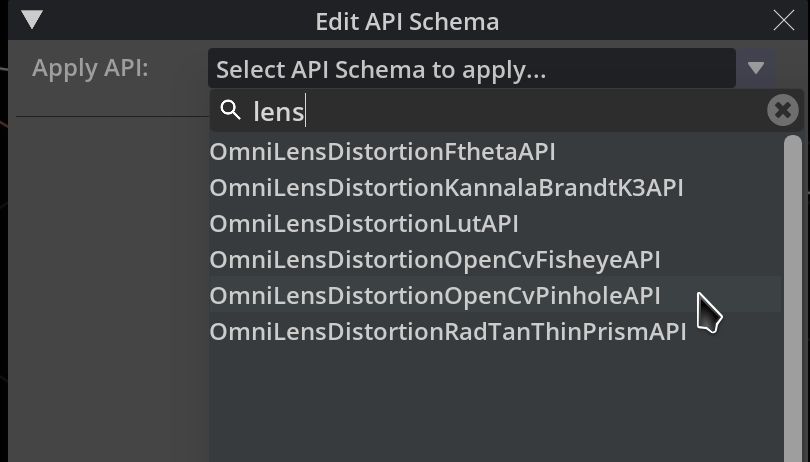
or by using the omni.kit.widget.schema_api extension. The Schema API widget adds functionality for adding a schema to a prim from the Property Window:
OmniLensDistortionOpenCvPinholeAPI#
Allows the use of OpenCV’s pinhole camera model.
Attribute Name |
Type |
Default |
Description |
|---|---|---|---|
omni:lensdistortion:model |
token |
opencvPinhole |
Allowed tokens: opencvPinhole |
omni:lensdistortion:opencvPinhole:cx |
float |
1024.0 |
|
omni:lensdistortion:opencvPinhole:cy |
float |
512.0 |
|
omni:lensdistortion:opencvPinhole:fx |
float |
900.0 |
|
omni:lensdistortion:opencvPinhole:fy |
float |
800.0 |
|
omni:lensdistortion:opencvPinhole:imageSize |
int2 |
(2048, 1024) |
Resolution, in pixels, that the calibration parameters ( |
omni:lensdistortion:opencvPinhole:k1 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:k2 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:k3 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:k4 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:k5 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:k6 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:p1 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:p2 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:s1 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:s2 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:s3 |
float |
0.0 |
|
omni:lensdistortion:opencvPinhole:s4 |
float |
0.0 |
OmniLensDistortionOpenCvFisheyeAPI#
Allows the use of OpenCV’s fisheye camera model.
Attribute Name |
Type |
Default |
Description |
|---|---|---|---|
omni:lensdistortion:model |
token |
opencvFisheye |
Allowed tokens: opencvFisheye |
omni:lensdistortion:opencvFisheye:cx |
float |
1024.0 |
|
omni:lensdistortion:opencvFisheye:cy |
float |
512.0 |
|
omni:lensdistortion:opencvFisheye:fx |
float |
900.0 |
|
omni:lensdistortion:opencvFisheye:fy |
float |
800.0 |
|
omni:lensdistortion:opencvFisheye:imageSize |
int2 |
(2048, 1024) |
Resolution, in pixels, that the calibration parameters ( |
omni:lensdistortion:opencvFisheye:k1 |
float |
0.00245 |
|
omni:lensdistortion:opencvFisheye:k2 |
float |
0.0 |
|
omni:lensdistortion:opencvFisheye:k3 |
float |
0.0 |
|
omni:lensdistortion:opencvFisheye:k4 |
float |
0.0 |
OmniLensDistortionLutAPI#
The generalized projection model enables arbitrary lens distortion modeling, both parametric and non-parametric, for any precision level given adequate calibration precision, with the use of user-provided textures.
Attribute Name |
Type |
Default |
Description |
|---|---|---|---|
omni:lensdistortion:lut:nominalHeight |
float |
1216.0 |
Height of the calibrated sensor |
omni:lensdistortion:lut:nominalWidth |
float |
1936.0 |
Width of the calibrated sensor |
omni:lensdistortion:lut:opticalCenter |
float2 |
(970.94244, 600.3748) |
|
omni:lensdistortion:lut:rayEnterDirectionTexture |
asset |
@@ |
Lookup table stored as an RGB image file where each RGB pixel value is the XYZ direction of rays entering the lens system in local camera space. |
omni:lensdistortion:lut:rayExitPositionTexture |
asset |
@@ |
Lookup table stored as an RGB image file where each RG pixel value is the [0, 1] U,V coordinate in normalized screen space where the ray for that pixel is emitted from on the image plane. |
omni:lensdistortion:model |
token |
lut |
Allowed tokens: lut |
This model depends on generating two textures to define its octahedral encoding operations.
rayEnterDirectionTexture: Defines the unproject from NDC (Normalized Device Coordinate) to view direction operation. At runtime, for a given pixel, NDC is used as UVs to sample the Direction Texture and get the ray direction to trace primary rays.
The texture should be a 32-bit float texture with three channels (RGB) which encodes the three components of a normalized direction.
The texture should store information for the unproject from NDC (Normalized Device Coordinate) to view direction operation.
For each texel, coordinates range from (0,0) to (textureWidth, textureHeight):
Use the normalized texture coordinate (UV) as the NDC.
Call a user-defined unproject function, which should return a normalized view direction in float3.
Store the three components of the resulting view direction in R, G, and B channels of the image data array respectively.
Pack into an EXR image by calling save_img (provided in sample script).
rayExitPositionTexture: Defines the project from view direction or view position to NDC operation. At runtime, for a given view direction or view position, the texture’s encoded view direction is sampled as UVs to look up for the NDC, which is used to compute the corresponding pixel position on screen.
The texture should be a 32-bit float texture with two channels (RG) which encodes the two components of a normalized screen position (NDC).
The texture should store information for the project view space direction or position to NDC operation.
For each texel, coordinates range from (0,0) to (textureWidth, textureHeight):
Use the normalized texture coordinate (UV) as the octahedral encoded view direction in float2.
Decode the encoded view direction using the script’s provided function get_octahedral_directions.
Call a user-defined project function; the function should return a normalized device/screen coordinate in float2, with a range from (0,0) to (1,1).
Store the two components of the resulting coordinate in the R and G channels of the image data array respectively.
Pack into an EXR by calling save_img (provided in sample script).
Note
Optical Center values should either be defined in the texture generation process or in the camera parameters. If defined by the textures, set the camera’s Optical Center values as half the Nominal Width and half the Nominal Height to avoid double-application. If not defined by the textures (i.e., texture is perfectly centered with (0.5, 0.5) as center), set the Optical Center in the camera parameters.
Note
Inaccurate projection artifacts may occur if the textures’ resolution is lower than the target view resolution.
Texture Generation Python Script Example
An example Python script to generate compatible fisheye polynomial textures which follow the model’s required convention is provided.
Python Script
1# Copyright (c) 2024, NVIDIA CORPORATION. All rights reserved.
2#
3# NVIDIA CORPORATION and its licensors retain all intellectual property
4# and proprietary rights in and to this software, related documentation
5# and any modifications thereto. Any use, reproduction, disclosure or
6# distribution of this software and related documentation without an express
7# license agreement from NVIDIA CORPORATION is strictly prohibited.
8
9
10# This script can generate textures compatible with the "GeneralizedProjectionTexture" lens projection.
11# It generates a forward/inverse texture pair that drives the projection.
12# This script can generate these textures by mimicing the existing omni fisheye projections
13# and baking them as textures.
14# This python script will require pipinstalls for the following python libraries:
15import OpenEXR
16import Imath
17import numpy as np
18from numpy.polynomial.polynomial import polyval
19
20# Compression for the .exr output file
21# Should be one of:
22# NO_COMPRESSION | RLE_COMPRESSION | ZIPS_COMPRESSION | ZIP_COMPRESSION | PIZ_COMPRESSION
23#g_compression = Imath.Compression.NO_COMPRESSION
24g_compression = Imath.Compression.ZIP_COMPRESSION
25
26
27# util functions
28def save_img(img_path: str, img_data):
29 """ Saving a numpy array to .exr file """
30
31 if img_data.ndim != 3:
32 raise "The input image must be a 2-Dimensional image"
33
34 height = img_data.shape[0]
35 width = img_data.shape[1]
36 channel_count = img_data.shape[2]
37
38 channel_names = ['R', 'G', 'B', 'A']
39
40 channel_map = {}
41 channel_data_types = {}
42
43 for i in range(channel_count):
44 channel_map[channel_names[i]] = img_data[:, :, i].tobytes()
45 channel_data_types[channel_names[i]] = Imath.Channel(Imath.PixelType(Imath.PixelType.FLOAT))
46
47 header = OpenEXR.Header(width, height)
48 header['Compression'] = g_compression
49 header['channels'] = channel_data_types
50 exrfile = OpenEXR.OutputFile(img_path, header)
51 exrfile.writePixels(channel_map)
52 exrfile.close()
53
54
55# decode an array of X and Y UV coordinates in range (0, 1) into directions
56def oct_to_unit_vector(x,y):
57 dirX, dirY = np.meshgrid(x, y)
58 dirZ = 1 - np.abs(dirX) - np.abs(dirY)
59
60 sx = 2 * np.heaviside(dirX, 1) - 1
61 sy = 2 * np.heaviside(dirY, 1) - 1
62
63 tmpX = dirX
64 dirX = np.where(dirZ <= 0, (1 - abs(dirY))*sx , dirX)
65 dirY = np.where(dirZ <= 0, (1 - abs(tmpX))*sy , dirY)
66
67 n = 1 / np.sqrt(dirX**2 + dirY**2 + dirZ**2)
68 dirX *= n
69 dirY *= n
70 dirZ *= n
71 return dirX, dirY, dirZ
72
73
74# encode an array of view directions (unit vectors) into octahedral encoding
75def unit_vector_to_oct(dirX, dirY, dirZ):
76 n = 1 / (np.abs(dirX) + np.abs(dirY) + np.abs(dirZ))
77 octX = dirX * n
78 octY = dirY * n
79
80 sx = 2*np.heaviside(octX, 1) - 1
81 sy = 2*np.heaviside(octY, 1) - 1
82
83 tmpX = octX
84 octX = np.where(dirZ <= 0, (1 - abs(octY))*sx, octX)
85 octY = np.where(dirZ <= 0, (1 - abs(tmpX))*sy, octY)
86 return octX, octY
87
88
89# take the texture width and height, generate the view directions for each texel in an array
90def get_octahedral_directions(width, height):
91 # octahedral vectors are encoded on the [-1,+1] square
92 x = np.linspace(-1, 1, width)
93 y = np.linspace(-1, 1, height)
94
95 # octahedral to unit vector
96 dirX, dirY, dirZ = oct_to_unit_vector(x, y)
97
98 return dirX, dirY, dirZ
99
100
101def poly_KB(theta, coeffs_KB):
102 theta2 = theta**2
103 dist= 1 + theta2 * (coeffs_KB[1] + theta2 * (coeffs_KB[2] + theta2 * (coeffs_KB[3]+ theta2 * coeffs_KB[4])))
104 return theta*dist
105
106
107#--unproject from sensor plane normalized coordindates to ray cosine directions
108def create_backward_KB_distortion(textureWidth, textureHeight, Width, Height,fx, fy,cx, cy,coeffs_KB):
109 from scipy.optimize import root_scalar
110
111 # Create a 2d array of values from [0-cx, 1-cx]x[0-cy, 1-cy], and normalize to opencv angle space. note scale from -0.5 to 0.5, hence sparing width/2.
112 screen_x = (np.linspace(0, 1, textureWidth) - cx)*Width/fx
113 screen_y = (np.linspace(0, 1, textureHeight) - cy)*Width/fy
114
115 # y is negated here to match the inverse function's behavior.
116 # Otherwise, rendering artifacts occur because the functions don't match.
117 screen_y = [-y for y in screen_y]
118
119 X, Y = np.meshgrid(screen_x, screen_y)
120
121 # Compute the radial distance on the screen from its center point
122 R = np.sqrt( X**2 + Y**2)
123
124 def find_theta_for_R(R, coeffs_KB):
125 if R > 0:
126 # Define a lambda function for the current R
127 func = lambda theta: poly_KB(theta,coeffs_KB) - R
128 # Use root_scalar to find the root
129 theta_solution = root_scalar(func,
130 bracket=[0, np.pi/1],
131 method='brentq',
132 xtol=1e-12, # Controls absolute tolerance
133 rtol=1e-12, # Control relative tolerance
134 maxiter=1000) # Set max iteration
135 return theta_solution.root
136 else:
137 return 0 # Principal point maps to z-axis
138
139 # Vectorize the function
140 vectorized_find_theta = np.vectorize(find_theta_for_R,excluded=coeffs_KB)
141 theta=vectorized_find_theta(R,coeffs_KB)
142
143 # compute direction consines.
144 X = X / R
145 Y = Y / R
146 sin_theta = np.sin(theta)
147 dirX = X * sin_theta
148 dirY = Y * sin_theta
149 dirZ = -np.cos(theta)
150
151 # set the out of bound angles so that we can clip it in shaders
152 dirX = np.where(abs(theta) >= np.pi, 0, dirX)
153 dirY = np.where(abs(theta) >= np.pi, 0, dirY)
154 dirZ = np.where(abs(theta) >= np.pi, 1, dirZ)
155
156 return dirX, dirY, dirZ
157
158#--Project
159def create_forward_KB_distortion_given_directions(dirX, dirY, dirZ, Width, Height, fx, fy,cx, cy, coeffs_KB):
160 # compute theta between ray and optical axis
161 sin_theta = np.sqrt(dirX**2 + dirY**2)
162 theta = np.arctan2(sin_theta, -dirZ)
163
164 # appy forward distortion model
165 y=poly_KB(theta, coeffs_KB)
166
167 # normalize to render scale
168 Rx = y/Width*fx
169 Ry = y/Width*fy
170 dirX = np.where(sin_theta != 0, dirX * (Rx / sin_theta), dirX)
171 dirY = np.where(sin_theta != 0, dirY * (Ry / sin_theta), dirY)
172
173 return dirX + cx, dirY + cy
174
175
176def create_forward_KB_distortion_octahedral(width, height, Width, Height, fx, fy,cx, cy, coeffs):
177 # convert each texel coordinate into a view direction, using octahedral decoding
178 dirX, dirY, dirZ = get_octahedral_directions(width, height)
179
180 # project the decoded view direction into NDC
181 # TODO replace this call with your own `project` function
182
183 return create_forward_KB_distortion_given_directions(dirX, dirY, dirZ, Width, Height, fx, fy,cx, cy, coeffs)
184
185
186def generate_hq_fisheye_KB(textureWidth, textureHeight,Width, Height, fx, fy,centerX,centerY,polynomials):
187 from datetime import datetime
188 # Create date string as part of texture file name
189 date_time_string = datetime.now().strftime("%Y_%m_%d_%H_%M_%S")
190
191 # Create encoding for "unproject", i.e. NDC->direction
192 dirX, dirY, dirZ = create_backward_KB_distortion(textureWidth, textureHeight,Width, Height, fx, fy,centerX, centerY, polynomials)
193 dirX = dirX.astype("float32")
194 dirY = dirY.astype("float32")
195 dirZ = dirZ.astype("float32")
196
197 # image data has 3 channels
198 direction_img_data = np.zeros((textureHeight, textureWidth, 3), dtype=np.float32)
199 direction_img_data[:, :, 0] = dirX
200 direction_img_data[:, :, 1] = dirY
201 direction_img_data[:, :, 2] = dirZ
202 save_img(f"texture/fisheye_direction_{textureWidth}x{textureHeight}_unproject_KB_{date_time_string}.exr", direction_img_data)
203
204 # Create encoding for "project", i.e. direction->NDC
205 x, y = create_KB_inverse_distortion_octahedral(textureWidth, textureHeight, Width, Height, fx, fy,centerX, centerY, polynomials)
206 x = x.astype("float32")
207 y = y.astype("float32")
208
209 # image data has 2 channels (NDC.xy)
210 NDC_img_data = np.zeros((textureHeight,textureWidth,2), dtype=np.float32)
211 NDC_img_data[:, :, 0] = x
212 NDC_img_data[:, :, 1] = y
213
214 # save the image as exr format
215 save_img(f"texture/fisheye_NDC_{textureWidth}x{textureHeight}_project_KB_{date_time_string}.exr", NDC_img_data)
216
217
218def main():
219 # Generates high quality example texture based on opencv fisheye(KB) distortion model.
220
221 # Renderer resolution settings as desired
222 textureWidth = 3840
223 textureHeight = 2560
224
225 # Camera parameters from OpenCV calibration output or other sources
226 # Image resoluton
227 Width=1920
228 Height=1280
229
230 # Optical center
231 centerX = 0.5
232 centerY = 0.5
233
234 # Focal length
235 fx=731
236 fy=731
237
238 # OpenCV Fisheye model.
239 polynomials_KB = [1,-0.054776250681940974,-0.0024398746462049982,-0.001661261528356045,0.0002956774267707282]
240 generate_hq_fisheye_KB(textureWidth, textureHeight,Width, Height, fx, fy,centerX,centerY,polynomials_KB)
241
242
243if __name__ == "__main__":
244 main()
Note
The textures are generated in the EXR format, which can be viewed with apps such as RenderDoc, and the OpenEXR package can be installed via: pip install OpenEXR
OmniLensDistortionOmniDirectionalStereoAPI#
Configures a single-eye Omni-Directional Stereo (ODS) camera for 360-degree VR rendering. A stereo ODS output is composed from separate left/right-eye cameras, commonly stacked vertically (top/bottom).
Attribute Name |
Type |
Default |
Description |
|---|---|---|---|
omni:lensdistortion:model |
token |
omniDirectionalStereo |
Allowed tokens: omniDirectionalStereo |
omni:lensdistortion:omniDirectionalStereo:isLeftEye |
bool |
false |
Whether this camera represents the left eye in the stereo pair. |
omni:lensdistortion:omniDirectionalStereo:interpupillaryDistance |
float |
0.064 |
Interpupillary distance (IPD) in meters. Symmetric offsets of −IPD/2 for the left eye and +IPD/2 for the right eye are applied automatically. |
Scene Partitions#
Different cameras may be used to render different parts of a scene. This can be useful, for example, to render many individual robot simulation environments in a single scene without the different environments being visible to each other.
Note
Scene partitioning is disabled by default. To enable it, use the setting --/renderer/scenePartitioning/enabled=true.
Partitions are declared using the token primvars:omni:scenePartition primvar. By setting this primvar to a non-empty token on a given prim, that prim and all its descendents will be assigned to that partition.
At this point, only cameras that have a matching token omni:scenePartition attribute will render that prim and its descendents. Any cameras that do not have a matching token omni:scenePartition attribute will not render that prim and its descendents, including cameras that do not have an omni:scenePartition attribute set at all.
Conversely, any prims that are not assigned to a partition will be rendered by ALL cameras.
For example, consider the following scene consisting of a ground and two logo objects, with three cameras: one, Camera pointing straight down, another, Camera_left angled from the left, and a third, Camera_right angled from the right.
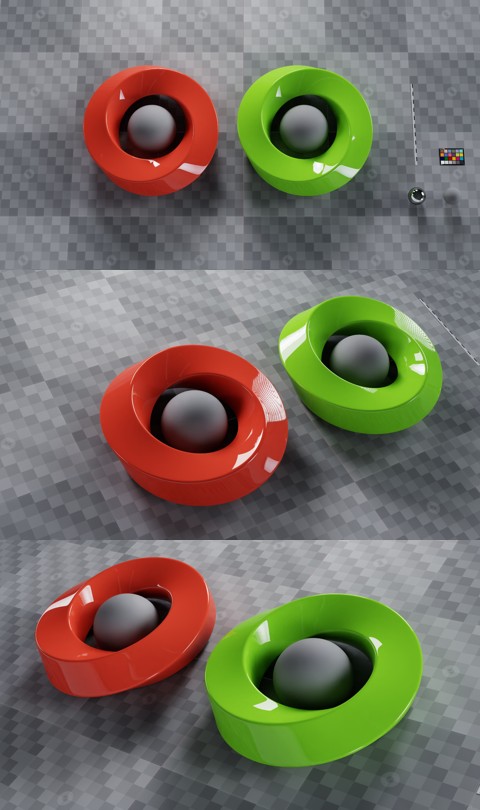
Camera_left has omni:scenePartition = "left", and Camera_right has omni:scenePartition = "right". Since no partitions have been assigned to any prims, the entire scene is visible in all cameras.
Now, if the red Logo_left is assigned primvars:omni:scenePartition = "left" then it disappears from the view of both Camera and Camera_right, but is still visible in Camera_left:
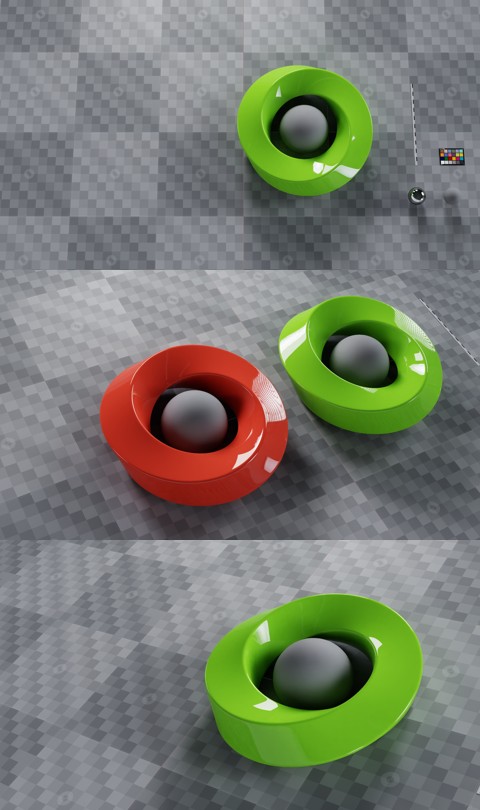
The red logo has “left” assigned to its top-level Xform so it disappears from the view of both Camera and Camera_right, but is still visible in Camera_left#
And finally, if the green Logo_right is assigned primvars:omni:scenePartition = "right" then it disappears from the view of both Camera and Camera_left, but is still visible in Camera_right:
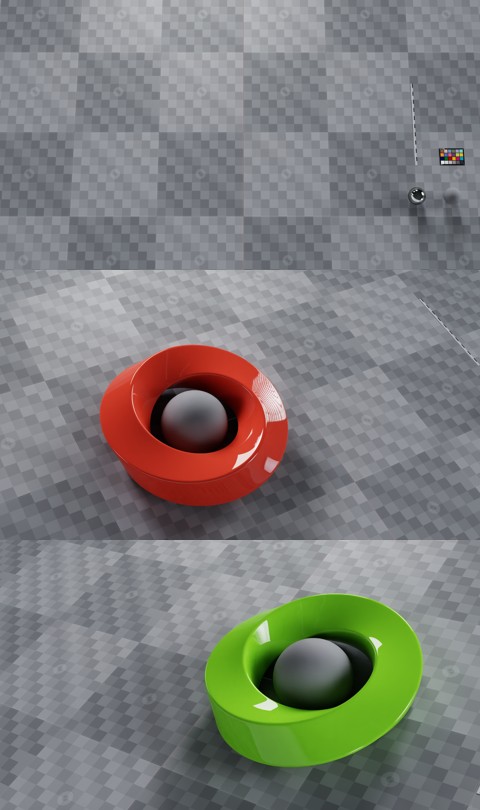
The green logo has “right” assigned to its top-level Xform so it disappears from the view of both Camera and Camera_left, but is still visible in Camera_right#
Note that the background objects that have not been assigned a partition are still visible in all cameras.
Limitations#
In the current version, the following prim types are not supported with scene partitioning:
DomeLights. All other light types do work.
Deforming geometry. Static geometry works correctly, but deforming geometry may clip to its undeformed bounds.
These limitations will be removed in a future version.