Inspect Physics
About
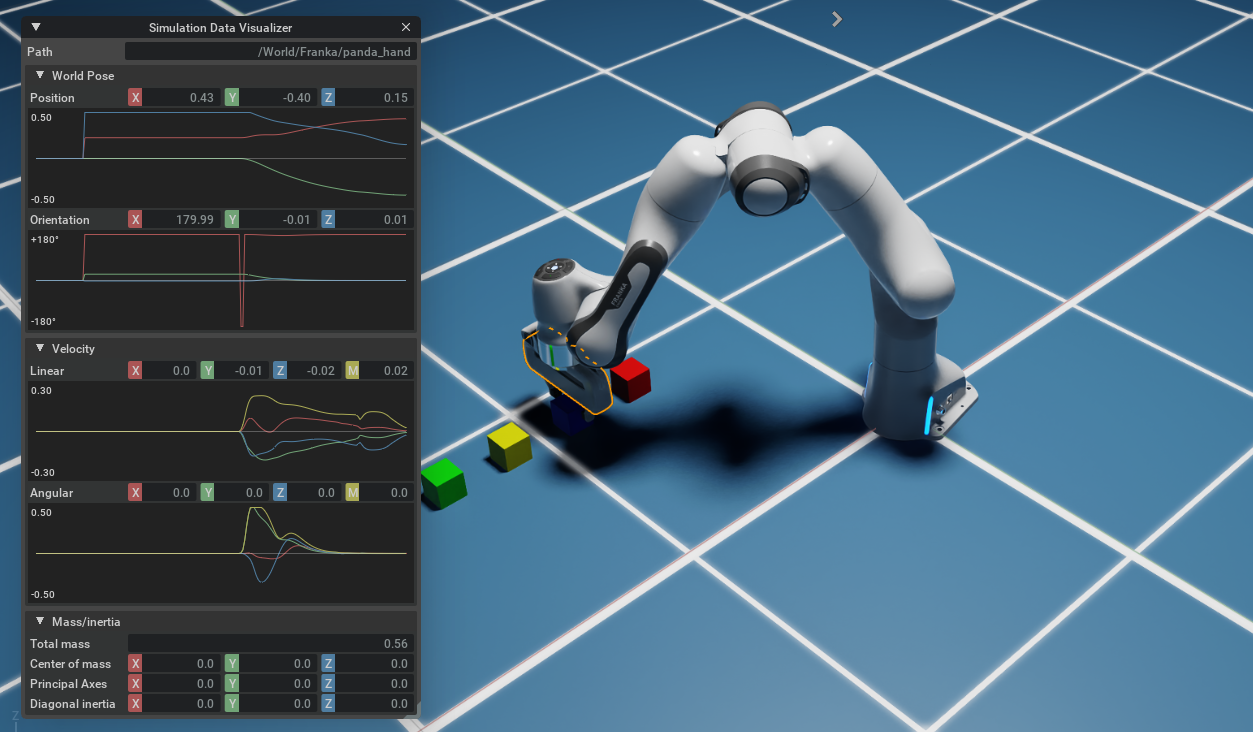
The Inspect Physics Extension is used to visualize physics information for a dynamic rigid body. Use this extension to better understand the behaviors of physics-enabled geometry during simulation.
Note
The simulator must be active (the PLAY button is pressed) in order to inspect the selected physics-enabled prim.
This extension is enabled by default. If it is ever disabled, it can be re-enabled from the Extension Manager by searching for omni.isaac.physics_inspector.
To access this Extension, go to the top menu bar and click Isaac Utils > Inspect Physics.
Conventions
This extension visualizes the following information:
Velocity Coordinate Frame: choose whether velocity represented in the Global or Local coordinate frame
Mass: in kg
Moment of Inertia: in kg*cm^2
Position: in Stage units [X, Y, Z]
Rotation: in quaternions [QW, QX, QY, QZ]
Linear Velocity: in cm/s
Angular Velocity: in rad/s
Linear Acceleration: in cm/s^2
Tutorials & Examples
Tutorials
Examples
Inspect Physics: Isaac Utils > Inspect Physics
Inspect Physics Example
To run this Utility:
Open the Inspect Physics Extension by going to the top menu bar and clicking Isaac Utils > Inspect Physics.
Now load simulation-ready example, such as the Carter URDF Example, by clicking Isaac Examples > Import Robots > Carter URDF.
Press the Load Robot button.
Press the Configure Drives button.
Press the Move to Pose button.
Select the /carter/chassis_link prim from the Stage.
Press the PLAY button to begin simulating.
Once simulation starts, the current physics state of the selected rigid body will update in the Inspect Physics window.