VFI Performance Considerations#
Some of the considerations below may not have a large impact on smaller spaces, but they start being felt as you scale to large factory scenarios.
Very Large Spanning Single Meshes#
The bounding box of a large spanning single mesh will end up intersecting bounding boxes many other meshes in the space. This slows down the rendering process. For more information on why the rendering process may slow, check out the useful link section below.
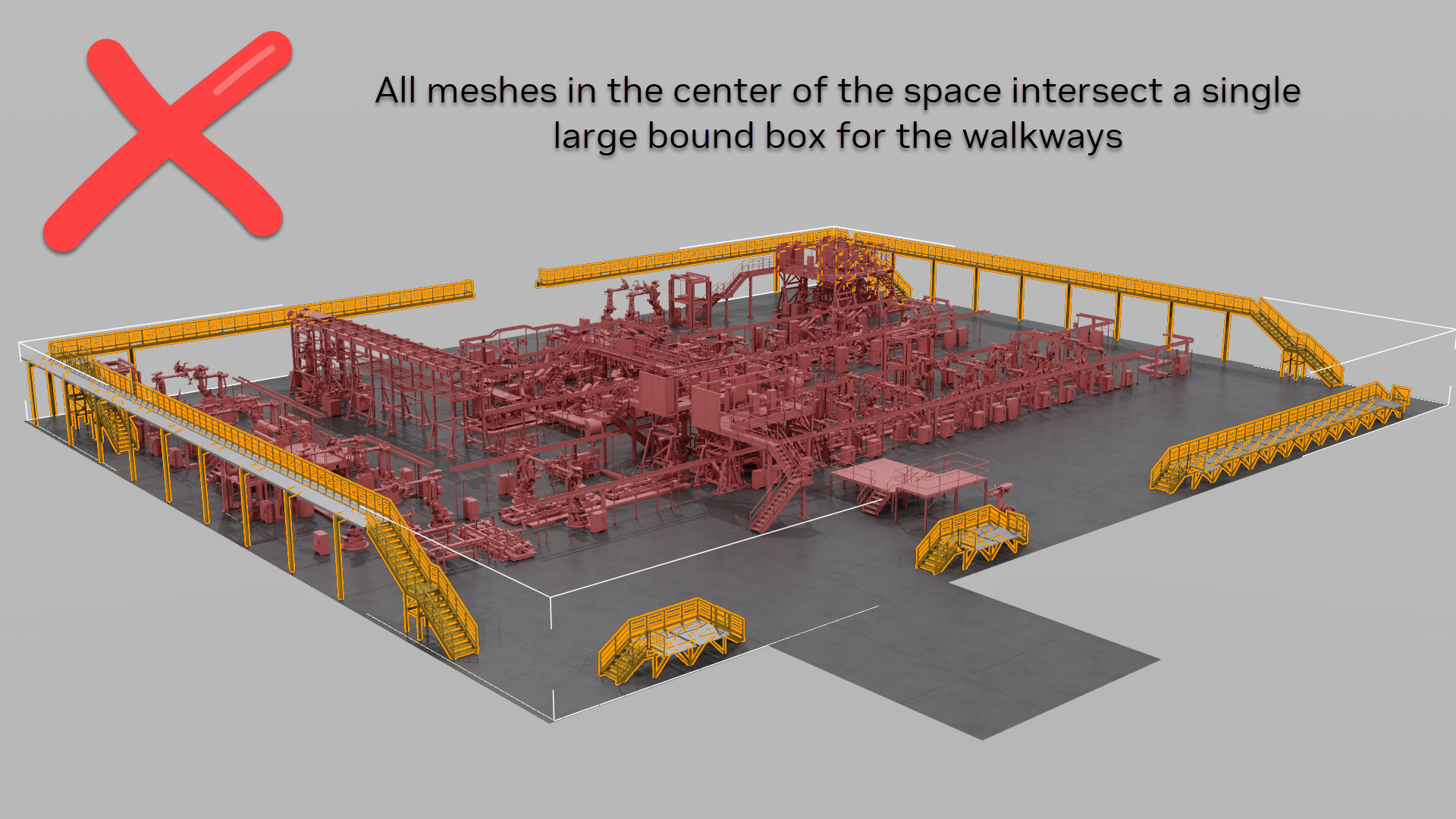
Single merged mesh where bounding box intersects all other prims#
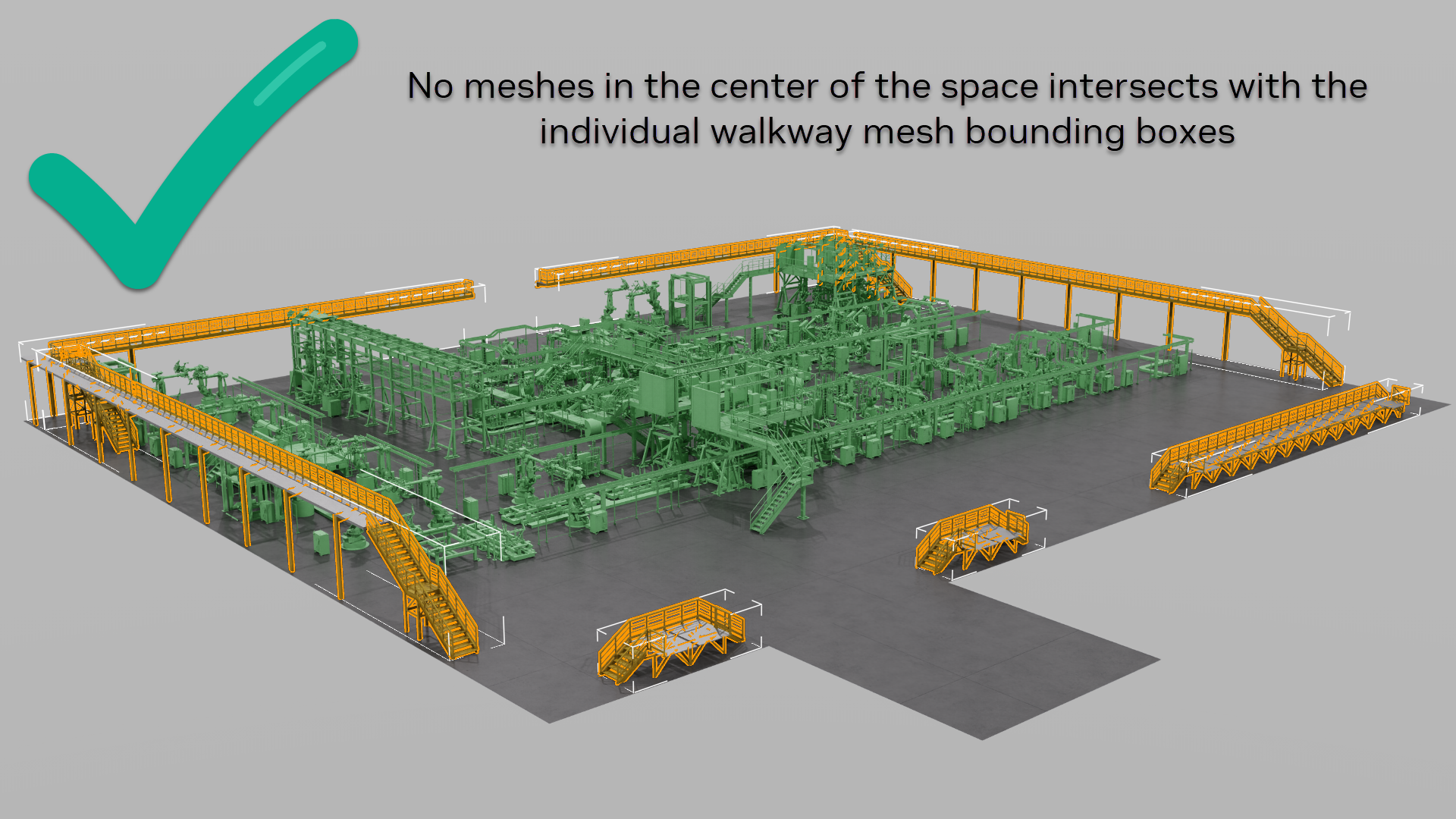
Multiple meshes where each are tight around the geometry and does not intersect with other prims#
How to comply:
Organize things in beforehand in CAD applications to avoid this issue.
Scene Optimizer Merge Meshes - to create the groupings for large data sets, you may want to tag prims that are to be merged together and use strict attribute mode in the merge meshes processor. You can also have other data sources that specify how things are supposed to be merged together and do the merging step via scripts.
To retroactively fix merged meshes use Scene Optimizer Split and Merge using spacial clustering mode.
Large Mesh with Majority of Empty Space#
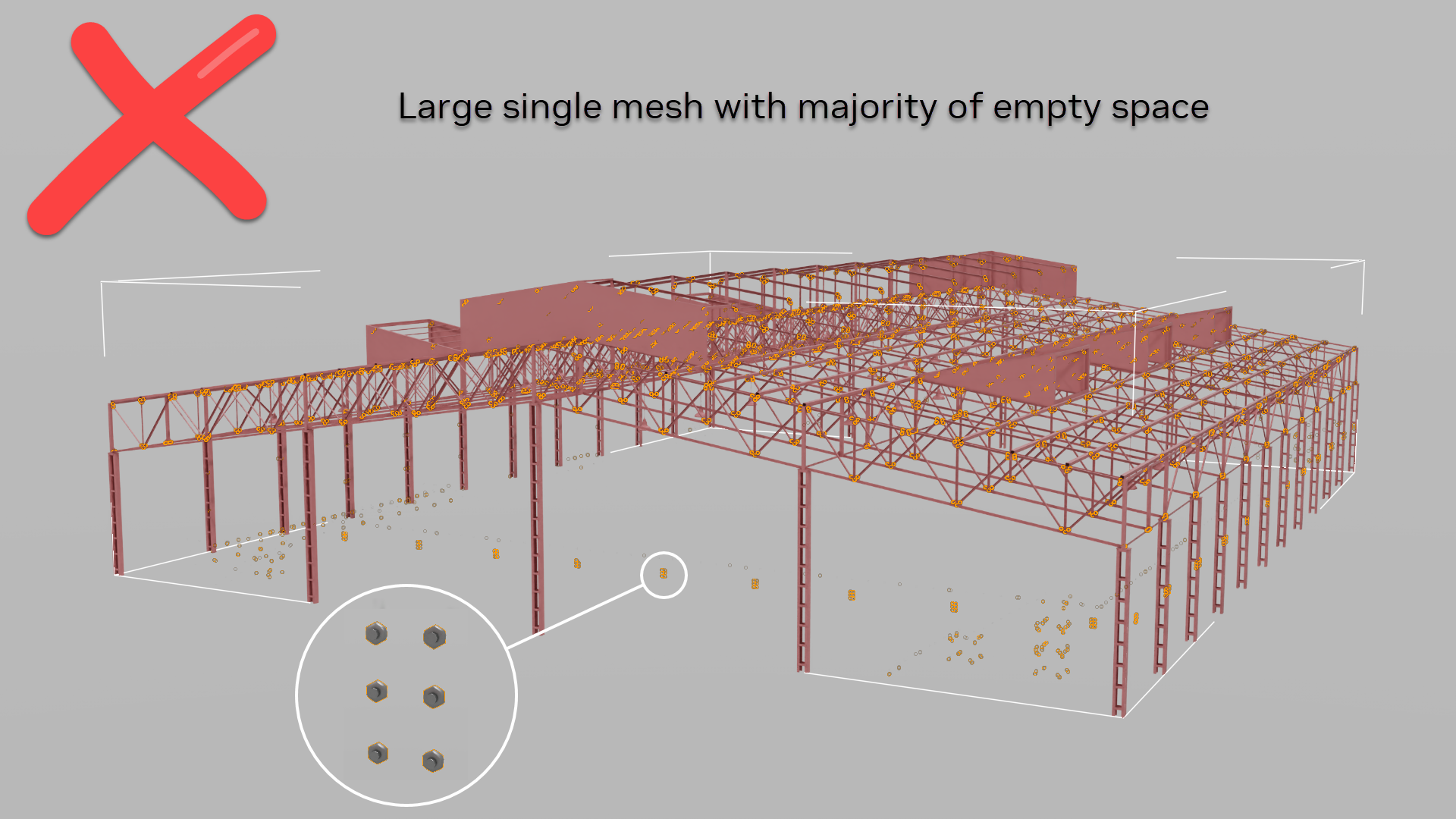
Large mesh with a majority of empty space#
How to comply:
Depending on your needs, you can merge the bolts into each mesh that they belong to in source data or as a post-process step.
Point instance the bolts.
- SO Merge Meshes using spacial clustering mode
If you are already merging meshes in your pipeline, leverage spatial clustering to merge meshes that form individual merged meshes that contain less empty space.
- Scene Optimizer Split and Merge using spacial clustering mode
If your output already has very large meshes, you can split and merge the mesh into clusters at another point in your pipeline.
High Number of Identical Meshes and Prim Hierarchies#
How to comply:
- Element ID attributes can cause meshes to not deduplicate and generate large amounts of Geometry Subsets
To disable Geometry Subset creation when converting DGN files to USD, set mergedAttributeStyle to 0 in your DGN Converter config. View the omni.kit.converter.dgn_core documentation for more details.
UVs can consume large amounts of extra RAM, so only add them if you are going to be using materials that require texture mapping.
Note
If there are materials at the part levels for many duplicates, it may be necessary to optimize materials (deduplicate) before you de-duplicate the geometry.
Further reading
High Number of Basis Curve Intersections#
Currently basis curve intersections are slower to render. Make sure that your curve width is as small as possible to minimize the number of curve intersections in your stage. If you need an increased width, consider lowering your reliance on curves and use mesh prims instead.
How to comply:
Python script to find basis curves and set width.
Tip
The script can be a Scene Optimizer Python processor.
from pxr import Usd, UsdGeom, Sdf, UsdShade
import omni.usd
usd_file = "path/to/your/usd/file.usd"
# Get stage by opening a USD file
stage = Usd.Stage.Open(usd_file)
# OR
# Get stage from Kit application session
stage = omni.usd.get_context().get_stage()
# Get basis curve prim in loop and set width
for prim in stage.Traverse():
if prim.IsA(UsdGeom.BasisCurves):
# Create a UsdGeomBasisCurves wrapper for the prim
curve = UsdGeom.BasisCurves(prim)
# Get the number of curves in this BasisCurves prim
curve_counts = curve.GetCurveVertexCountsAttr().Get()
# Print diagnostic information
print(f"Prim path: {prim.GetPath()}")
print(f"Curve counts: {curve_counts}")
# Check if points exist
points = curve.GetPointsAttr().Get()
print(f"Number of points: {len(points) if points is not None else 'None'}")
# If we do not have curve counts but we have points, try to set width directly
if curve_counts is None or len(curve_counts) == 0:
if points is not None and len(points) > 0:
# Try setting a constant width for the whole curve
curve_width = 0.3 # Width in scene units
curve.GetWidthsAttr().Set(curve_width)
print(f"Set constant width {curve_width} for curve at {prim.GetPath()}")
else:
print(f"Cannot set width: No points or curve data found in {prim.GetPath()}")
else:
# Original approach with per-curve widths
curve_width = 0.3 # Width in scene units
per_curve_widths = [curve_width] * len(curve_counts)
curve.GetWidthsAttr().Set(per_curve_widths)
curve.SetWidthsInterpolation(UsdGeom.Tokens.uniform)
print(f"Set width {curve_width} for {len(curve_counts)} curves in {prim.GetPath()}")
stage.Save()