Bringing in Autonomous Systems
NVIDIA Omniverse™ Isaac Sim is a robotics simulation toolkit for the NVIDIA Omniverse™ platform. Isaac Sim has essential features for building virtual robotic worlds and experiments. It provides you with the tools and workflows needed to create robust physically accurate simulations and synthetic datasets. It supports navigation and manipulation applications, simulates sensor data, and enables domain randomization, ground-truth labeling, segmentation, and bounding boxes.
Omniverse Isaac Sim uses the NVIDIA Omniverse™ Kit SDK, a toolkit for building native Omniverse applications and microservices. It also uses the USD interchange file format to represent scenes and relies on NVIDIA Omniverse™ Nucleus to access content such as USD files for environments and robots.
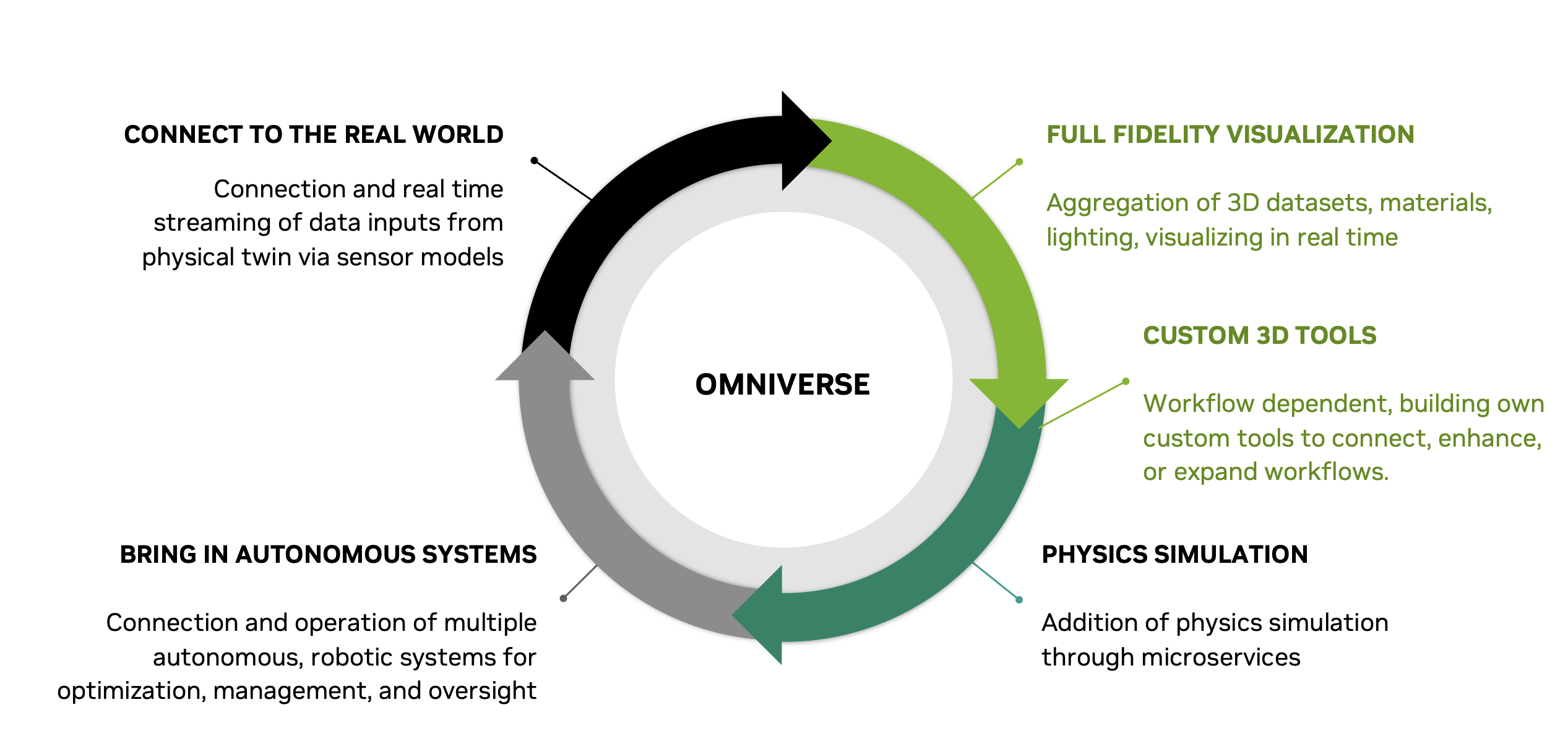
When building digital twins for warehouses, Isaac Sim enables you to bring in your autonomous systems. More specifically, you can connect and operate multiple autonomous, robotics systems for optimization, management, and oversight.
In this section, we provide you with a simple workflow to bring in autonomous systems. For more advanced tutorials and extra resources, check out Isaac Sim Documentation Portal.
Bring in a Robot Model
If your robot is not built in, Isaac Sim makes it straightforward to import your own robot model into the simulation. Many robots have a URDF file which can be used to import the robot into Omniverse. Additionally, robots can be imported directly from CAD files using connectors like the Onshape connector. After a robot is imported from CAD, it must be rigged. Rigging the robot allows the model to move like an articulated robot and to be controlled by the simulator.
Importing robots Tutorial:
Using Onshape Importer: