Physics Demo Nuts and Bolts
Overview
Experiment with the real-time, scalable simulation of objects with arbitrary collision shapes.
This demo demonstrates hundreds of nuts threading gracefully onto bolts.

The feature leverages signed distance field (SDF) collision detection and the compute power of NVIDIA RTX GPUs to resolve millions of contacts between high-detail models in real-time.
Parameters
Parameter |
Description |
|---|---|
Number of nuts and bolts (parameter on startup) |
Defines the number of nuts and bolts to simulate in the demo |
Friction |
Sets the friction between the nuts and bolts (Lower friction results in faster threading.) |
Controls
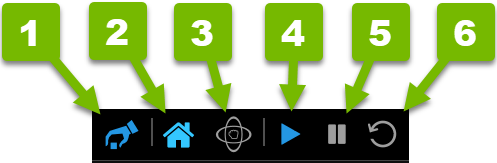
Reference # |
Control |
Shortcut |
Description |
|---|---|---|---|
1 |
Physics Interaction Mode |
I, then click and drag a nut |
Spins the nut further onto the bolt |
2 |
Home |
H |
Returns the Viewport camera to the scene’s point of origin |
3 |
Orbit |
Alt + Left Mouse Button |
Rotates the Viewport camera around a given point |
4 |
Play |
Space (while paused) |
Plays the animation |
5 |
Pause |
Space (while playing) |
Pauses the animation |
6 |
Restart |
N/A |
Restarts the animation |