Physics Demo Franka Deformable
Overview
Experience the simulation of complex robotic interactions involving deformable, soft-body objects.
This demo showcases Franka Emika robotic arms that pick up jelly cubes.

The simulation in this demo uses the PhysX finite-element-method (FEM), which evolves robotic research and development from rigid-body objects to soft-body ones. This helps simulate the many items that robots encounter in everyday tasks.
Parameters
Parameter |
Description |
|---|---|
Number of robots (parameter on startup) |
Defines the number of robots to simulate in the demo |
Controls
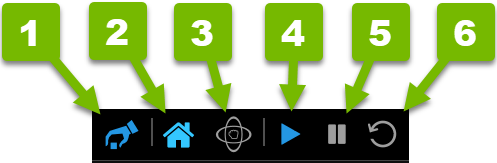
Reference # |
Control |
Shortcut |
Description |
|---|---|---|---|
1 |
Physics Interaction Mode |
I, then click and drag a robotic arm |
Moves the arm |
2 |
Home |
H |
Returns the Viewport camera to the scene’s point of origin |
3 |
Orbit |
Alt + Left Mouse Button |
Rotates the Viewport camera around a given point |
4 |
Play |
Space (while paused) |
Plays the animation |
5 |
Pause |
Space (while playing) |
Pauses the animation |
6 |
Restart |
N/A |
Restarts the animation |