Replicator Composer Parameter List
Note
Replicator Composer is deprecated. Please view the documentation for Replicator YAML.
Replicator Composer is a tool for creating parameterizable offline datasets in Isaac Sim.
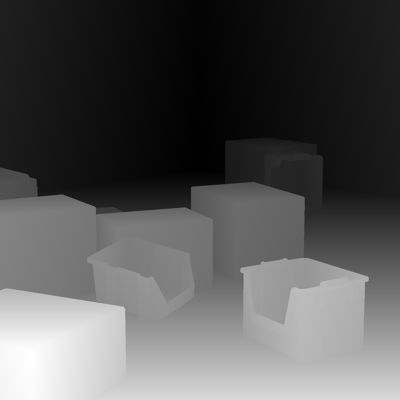
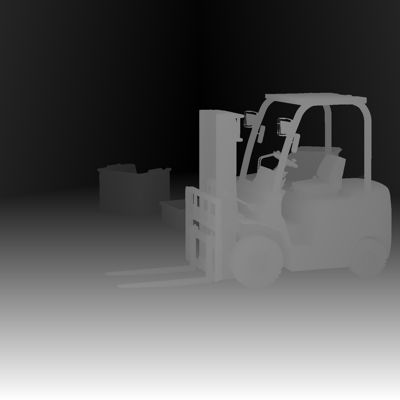
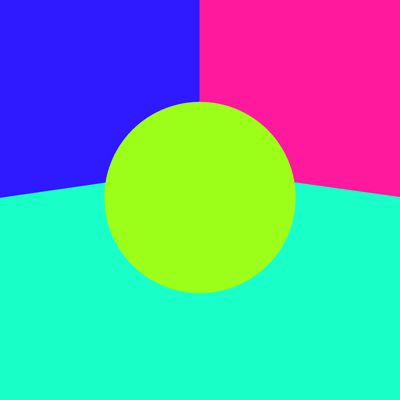
This page provides the list of input parameters for dataset generation. All examples are generated with Replicator Composer.
The Replicator Composer Manual explains how to write the input parameter file with the parameters.
The Replicator Composer Tutorial explains how to run Replicator Composer.
Parameter Tree
Object Parameters
Object Appearance – model and surface properties on an object
Object Dimensions – dimensions of an object
Object Placement – location of an object
Object Movement – movement of an object during a sequence
Object Class – class ID of an object group
Light Parameters
Light Luminescence – color and brightness of a light
Light Shape – shape or form of a light
Light Placement – location of a light
Light Movement – movement of a light during a sequence
Scenario Parameters
Scenario Model – model / type of the base scenario
Scenario Room – dimensions and appearance of the scenario room
Sky Box – toggle, texture, and brightness of the sky box
Scenario Class - class ID of the base scenario
Camera Parameters
Camera Lens – resolution and lens characteristics of the camera(s)
Camera Placement – stereo vs mono toggle and location of the camera(s)
Camera Movement – movement of the camera(s) during a sequence
Output Parameters
Dataset – name and size of the output dataset
Sequence – toggle and configurations of a sequential dataset
Output Data Types – toggles and configurations of output data types
Other Parameters
Simulation – rendering, unit, and physics configurations in Isaac Sim
Model Store – Nucleus Server URL
Parameter List
Object Parameters
Object Appearance
Parameters for object model and surface properties.
obj_model






Value: String of model (file type: USD) on Nucleus Server
Example:
/Isaac/Props/Forklift/forklift.usd
obj_color






/NVIDIA/Materials/Base/Wood/Parquet_Floor.mdl.





Value: Tuple of 3 numbers, each an RGB value from 0 to 1
Example:
Uniform((0, 0, 0), (1, 1, 1))
obj_texture
/Isaac/Materials/Textures/Patterns.





/Isaac/Materials/Textures/Backgrounds.




Value: String of image (file types: PNG / JPEG / HDR / EXR) on Nucleus Server.
Example:
Choice(["assets/textures/backgrounds.txt"])
obj_texture_scale


Value: Positive number
Example:
Choice([(0.01, 0.01), (0.1, 0.1), (1, 1)])
obj_texture_rot
Value: Positive number
Example:
Uniform(0, 360)
obj_material





Value: String of material (file type: MDL) on Nucleus Server
Example:
/NVIDIA/Materials/Base/Wood/Cherry_Planks.mdl
Object Dimensions
Parameters that determine the dimensions of an object.
obj_size_enabled
True: obj_size determines an object dimensions (default value).False: obj_scale determines the dimensions of an object.obj_size
True.




Value: Number or Tuple of 3 numbers, which specify different size values for each axis.
Example:
Uniform(100, 200)
obj_scale
True.Value: Number or Tuple of 3 numbers, which specify different scale values for each axis.
Example:
Uniform(0.5, 2)
Object Placement
Parameter for determining the location of an object
obj_count
0. Therefore, to spawn objects, must be set to a non-zero value.
Value: Non-negative integer
Example:
Range(0, 10)
obj_physics
True: object is given a hitbox and dropped.False: object is flying (default value).False.





obj_centered
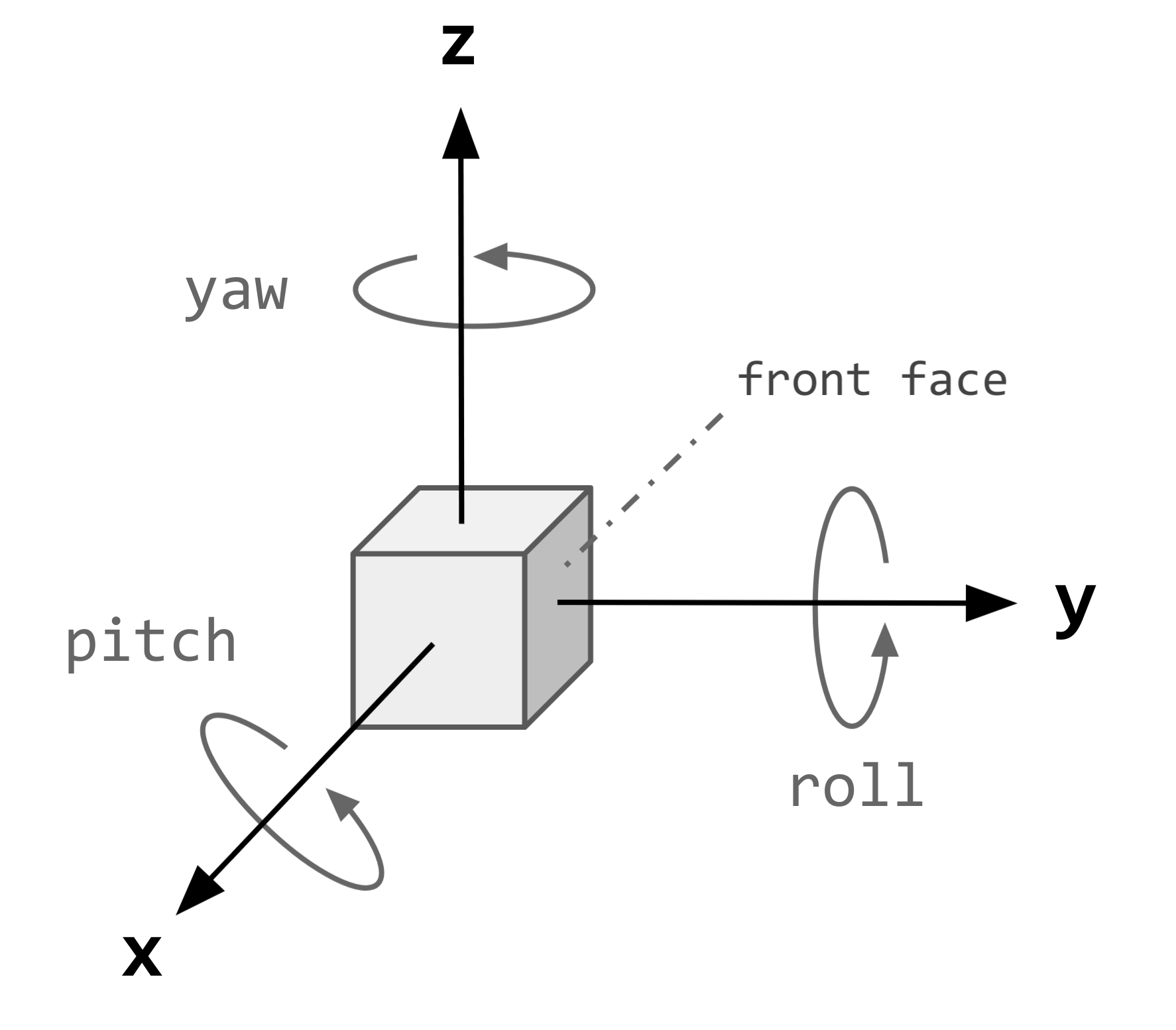
True: object origin is centered at the model center (default value)False: object origin is the authored origin of the model. Object will rotate around this origin.obj_rot






Value: Tuple of three numbers (pitch, roll, yaw) in degrees
Example:
Uniform((0, 0, 0), (360, 360, 360))
obj_coord
False.Value: Tuple of three values in scene units
Example:
Uniform((-200, -200, 0), (200, 200, 0))
obj_coord_camera_relative
True: obj_distance, obj_horiz_fov_loc, and obj_vert_fov_loc determine the object location (default value).False: obj_coord determines the determine object location.obj_distance
True.Value: Number
Example:
Uniform(300, 800)
Object Movement
Parameters to determine how an object moves during a sequence.
obj_{horiz/vert}_fov_loc
True.



Value: Number
Example:
Uniform(-1, 1)
obj_vel
True.coord[i] = coord[i-1] + obj_vel * step_time + 0.5 * obj_accel * step_time**2
Value: Tuple of 3 numbers
Example:
Normal((0, 0, 0), (50, 50, 50))
obj_rot_vel
True.rot[i] = rot[i-1] + obj_rot_vel * step_time + 0.5 * obj_rot_accel * step_time**2
Value: Tuple of 3 numbers in degrees
Example:
Normal((0, 0, 0), (10, 10, 10))
Object Class
Parameter to assign class id to an object.
obj_class_id
Value: Integer between 0 and 255 or string that represents semantic labels.
Example:
1
Light Parameters
Light Luminescence
Parameters for light color and brightness.
light_color
If light_temp_enabled is False: Analogous to obj_color.





light_temp
If light_temp_enabled is True: the light color temperature (in Kelvins).
Value: Positive number
Example:
5000
light_temp_enabled
True: light color is determined by light_temp.False: light color is determined by light_color (default value).light_intensity
Brightness of light source.





Value: Positive number
Example:
Uniform(10000, 50000)
Light Shape
Parameters describing the shape or form of a light source.
light_distant
True: light is an Isaac Sim DistantLight, which is distant plane of light rays (like sunlight).(0, 0, 0): sets the rays of light like noontime.False and light_directed is False: light is a point source (default value).light_directed
True and light_distant is False: light is a Isaac Sim DiskLight.False and light_distant is False: light is a point source (default value).Light Placement
Parameters for determining the location of a light.
light_count
Analogous to obj_count
light_rot
Analogous to obj_rot
light_distance
Analogous to obj_distance
light_{horiz/vert}_fov_loc
Analogous to obj_{horiz/vert}_fov_loc
light_coord
Analogous to obj_coord
light_coord_camera_relative
Analogous to obj_coord_camera_relative
Light Movement
Parameters to determine how a light moves during a sequence.
light_vel
Analogous to obj_vel
light_rot_vel
Analogous to obj_rot_vel
Scenario Parameters
Scenario Model
Parameters to determining the model of a scenario.
scenario_room_enabled
True: base scenario is a parameterizable rectangular prism (a “room”) centered at the origin.False: base scenario is a USD provided by scenario_model (default value).True.





scenario_model
False: the model of the base scenario.





Value: String of model (file type: USD) on Nucleus Server
Example:
/Isaac/Environments/Simple_Warehouse/warehouse.usd
Scenario Room
Parameters describing a scenario room’s appearance and size.
{floor/wall/ceiling}
True: then True or False determines if that room face is generated.wall_height
True: the height of the room.Value: Number
Example:
2000
floor_size
True: size of the floor and ceiling of the room.Value: Number
Example:
2000
{floor/wall/ceiling}_color
Analogous to obj_color
{floor/wall/ceiling}_texture
Analogous to obj_texture
{floor/wall/ceiling}_texture_scale
Analogous to obj_texture_scale
{floor/wall/ceiling}_texture_rot
Analogous to obj_texture_rot
{floor/wall/ceiling}_material
Analogous to obj_material
Sky Box
Parameters describing the sky box - a scene-encompassing cube with textures on its inner faces to simulate a sky or backdrop.
sky_texture
assets/textures/skies.txt.





Value: String of image (file types: PNG / JPEG / HDR / EXR) on Nucleus Server
Example:
Choice(["assets/textures/skies.txt"])
sky_light_intensity
0, the sky box is black.Value: Positive number
Example:
1000
Scenario Class
Parameter to assign class id to base scenario.
scenario_class_id
Camera Parameters
Camera Lens
Parameters for the resolution and lens properties.
img_{width/height}
The dimensions of the data
Value: Positive integer
Example:
1280/720
focal_length
Physical focal length of the camera in mm.





Value: Positive number
Example:
50
focus_distance
Distance at which perfect sharpness is achieved.
Value: Positive number
Example:
400
f_stop
Controls distance blurring. Lower numbers decrease focus range, larger numbers increase it.
Value: Positive number
Example:
0
{horiz/vert}_aperture
Emulates sensor/film width/height on a camera, measured in mm.
Value: Positive number
Example:
20.955/15.2908
Camera Placement
Parameters for placing mono or stereo cameras.
stereo
True: stereo cameras are used and output RGB data is in stereo.True: output groundtruth data is also in stereo.False: a mono camera is used (default value).stereo_baseline
If stereo is True: distance between stereo camera pairs.
Value: Number
Example:
20
camera_coord
Analogous to obj_coord.
Example:
Uniform((-500, -500, 20), (500, 500, 100))
camera_rot
Example:
Uniform(0, 360)
Camera Movement
Parameters for determining how the camera(s) move in a sequence.
camera_vel
Analogous to obj_vel
camera_rot_vel
Analogous to obj_rot_vel
Output Parameters
Dataset
Parameters for determining dataset name and size.
output_dir
The output files directory. Follows Paths rules.
Note, the command line argument --output will override parameter value of output_dir.
Value: String path
Example:
dataset
num_scenes
True: number of sequences in dataset.False: number of samples in dataset.--num-scenes will override the parameter value of num_scenes.Value: Positive integer
Example:
10000
Sequence
Parameters for enabling and configuring a dataset sequence.
sequential
True: num_scene sequences are generated.{sequence_id}_{sample_in_sequence_id}.003_16.png (sample 16 in sequence 3).If False: num_scene samples are generated, where each scene is used for 1 sample (default value).
sequence_step_count
If sequential is True: number of steps in a sequence.
Value: Positive integer
Example:
10
sequence_step_time
True: time taken per step in a sequence.coord[i] = coord[i-1] + vel * step_time + 0.5 * accel * step_time**2
rot[i] = rot[i-1] + rot_vel * step_time + 0.5 * rot_accel * step_time**2
Value: Positive number
Example:
0.5
Output Data Types
rgb
If True: images (3 channel PNG) are output.




depth(distance_to_camera)
If True: depth maps (NPY) are output.


instance_seg
True: instance segmentations (8 bit PNG) are output.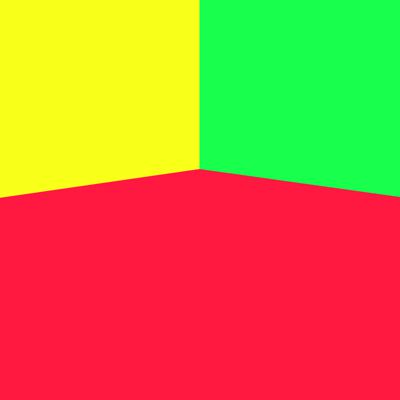
semantic_seg
True: semantic segmentations (8 bit PNG) are output.

bbox_2d_tight
If True: tight 2d bounding box data (NPY) are output. Note that the visuals are not supported for now.



bbox_2d_loose
If True: loose 2d bounding box data (NPY) are output. Note that the visuals are not supported for now.


bbox_3d
True: 3d bounding box data (NPY) are output.occlusion
True: occlusion data (NPY) are output.groundtruth_stereo
True and stereo is True: then the right stereo data for each active groundtruth will also be output.False: no right stereo data is output for groundtruth (default value).groundtruth_visuals
True: then PNG visualizations of each output groundtruth will also be output.False: no groundtruth visuals are output (default value).Other Parameters
Simulation
Parameters for rendering, unit, and physics configurations in Isaac Sim.
physics_simulate_time
True for at least 1 object in a scene: the number of seconds Isaac Sim will simulate the scene..Value: Positive number
Example:
1
scene_meters_per_unit
How many units in one meter, which is used to generate scenes and capture data. Default is 1.
Value: Positive number
Example:
1
path_tracing
True: Isaac Sim is rendered using PathTracing. Higher quality and slower.False: Isaac Sim is rendered using RayTracedLighting (default value).samples_per_pixel_per_frame
True: the numbers of rays traced per pixel per frame.Value: Positive integer
Example:
32
Model Store
Parameters for describing where models are stored. Currently, only the Nucleus Server is supported.
nucleus_server
--nucleus-server will override parameter value of nucleus_server.omniverse:// is prepended, if :// is not found in nucleus_server.Value: String URL
Example:
localhost
scene_gravity
Value: Boolean
Example:
True